










ΓΕΝΙΚΑ ΓΙΑ ΤΑ PLC



Ένας Programmable Logic Controller (PLC) είναι ένα ψηφιακό υπολογιστικό σύστημα το οποίο χρησιμοποιείται ως πλατφόρμα για την ανάπτυξη αυτοματοποιημένων εφαρμογών.
Τα PLC έχουν ένα ιδιαίτερα ευρύ πεδίο εφαρμογών από την αυτοματοποίηση της βαριάς βιομηχανίας έως απλές χρήσεις όπως ο έλεγχος φωτισμού.
Τα PLC αποτελούν την εξέλιξη των μεθόδων κλασικού αυτοματισμού (relay logic) που κυριαρχούσαν στην βιομηχανία έως και την δεκαετία του 80.
Η ανάπτυξη της τεχνολογίας οδήγησε στην ανάγκη για πιο ευφυή και αξιόπιστα συστήματα αυτοματοποίησης
Έτσι, την δεκαετία του 70 αρχίζουν να εμφανίζονται τα πρώιμα PLC και να χρησιμοποιούνται σε αυτοκινητοβιομηχανίες, όπως η General Motors, για την αυτοματοποίηση της γραμμής παραγωγής της.Αργότερα, οι ραγδαίες εξελίξεις στον τομέα της ηλεκτρονικής έδωσαν τεράστια ώθηση στην ανάπτυξη τωv μονάδων αυτοματισμού έως και σήμερα όπου τα PLC κυριαρχούν στην βιομηχανία παρέχοντας πολύ μεγαλύτερες δυνατότητες στους χρήστες τους.
Η ειδοποιός διαφορά μεταξύ άλλων υπολογιστικών συστημάτων και του PLC, προκύπτει από το γεγονός ότι τα τελευταία είναι εξοπλισμένα έτσι ώστε να μπορούν να αντιμετωπίσουν ακραίες καταστάσεις όπως σκόνη, υγρασία, ζέστη, κρύο.
Τα PLC έχουν ένα ιδιαίτερα ευρύ πεδίο εφαρμογών από την αυτοματοποίηση της βαριάς βιομηχανίας έως απλές χρήσεις όπως ο έλεγχος φωτισμού.
Τα PLC αποτελούν την εξέλιξη των μεθόδων κλασικού αυτοματισμού (relay logic) που κυριαρχούσαν στην βιομηχανία έως και την δεκαετία του 80.
Η ανάπτυξη της τεχνολογίας οδήγησε στην ανάγκη για πιο ευφυή και αξιόπιστα συστήματα αυτοματοποίησης
Έτσι, την δεκαετία του 70 αρχίζουν να εμφανίζονται τα πρώιμα PLC και να χρησιμοποιούνται σε αυτοκινητοβιομηχανίες, όπως η General Motors, για την αυτοματοποίηση της γραμμής παραγωγής της.Αργότερα, οι ραγδαίες εξελίξεις στον τομέα της ηλεκτρονικής έδωσαν τεράστια ώθηση στην ανάπτυξη τωv μονάδων αυτοματισμού έως και σήμερα όπου τα PLC κυριαρχούν στην βιομηχανία παρέχοντας πολύ μεγαλύτερες δυνατότητες στους χρήστες τους.
Η ειδοποιός διαφορά μεταξύ άλλων υπολογιστικών συστημάτων και του PLC, προκύπτει από το γεγονός ότι τα τελευταία είναι εξοπλισμένα έτσι ώστε να μπορούν να αντιμετωπίσουν ακραίες καταστάσεις όπως σκόνη, υγρασία, ζέστη, κρύο.
Η Betford υπήρξε η πρώτη εταιρία που κατάφερε με επιτυχία να επιλύσει τα προβλήματα του κλασσικού αυτοματισμού, με μια νέα συσκευή που ονομάστηκε Modular Digital Controller (MODICON), η οποία και διατέθηκε στο εμπόριο με το όνομα MODICON 084. Το 1973 παρουσιάζεται ένα νέο πρωτόκολλο επικοινωνίας της MODICON, το Modbus το οποίο δίνει την δυνατότητα στα PLCs να επικοινωνούν με άλλες συσκευές όπως αισθητήρες, αλλά και μεταξύ τους, με σκοπό την ανταλλαγή δεδομένων. Συγκεκριμένα είναι ένα απλό, ευέλικτο και ευρέως χρησιμοποιούμενο πρωτόκολλο αρχιτεκτονικής master/slave, το οποίο επιτρέπει την ανταλλαγή διακριτών αναλογικών σημάτων μεταξύ συσκευών. Το Modbus αναπτύχθηκε από την Schneider Electric (πρώην Gould Modicon) για συστήματα ελέγχου διαδικασίας (process control).
Που χρησιμοποιούνται τα PLC.
Τα PLC πρωτοχρησιμοποιήθηκαν στην βιομηχανία με επιτυχία. Κατά την εξέλιξη τόσο της τεχνολογίας όσο και των αναγκών, σήμερα η χρήση του πραγματοποιείται σε πολλά αυτοματοποιημένα συστήματα όπως: υδροηλεκτρικά φράγματα, συστήματα γεννητριών, ανεμογεννήτριες, ειδικευμένες εφαρμογές σε σπίτια,(στην γραμμή παραγωγής, εκεί που αυτοματοποείται μια διαδικασία) αυτόματες μηχανές συσκευασίας εμφιάλωσης, ανελκυστήρες, διυλιστήρια, πλοία, βιολογικοί καθαρισμοί, όλων των ειδών οι θύρες (γκαράζ, κεντρικές, μπαλκονιού κλπ).
Καθώς λοιπόν η χρήση του PLC είναι ευρύτερα γνωστή, τείνει να αντικαταστήσει πλήρως τον κλασικό αυτοματισμό. Αξίζει να σημειωθεί βέβαια ότι οι τεχνικοί οφείλουν να γνωρίζουν στοιχειώδη πράγματα από τα ηλεκτρονικά και τις βασικές αρχές των υπολογιστών για να μπορεί να διαβάσει και να κατανοήσει το πιο απλό εγχειρίδιο ενός PLC.
Τι είναι το PLC (Programmable Logic Controller)
Η προγραμματιζόμενη μονάδα λογικού ελέγχου ή προγραμματιζόμενος λογικός ελεγκτής (PLC), είναι ένας ψηφιακός υπολογιστής που χρησιμοποιείται για την αυτοματοποίηση των ηλεκτρομηχανολογικών διαδικασιών. Τα PLC δηλαδή είναι μικρουπολογιστικά συστήματα, που με το κατάλληλο προγραμματισμό λογικών εξισώσεων, επιλύουν προβλήματα αυτοματοποίησης. Με άλλα λόγια είναι μια κατηγορία συσκευών που η λειτουργία του βασίζεται στην χρήση μικροεπεξεργαστών ανάλογων με αυτούς που χρησιμοποιούνται στους ηλεκτρονικούς υπολογιστές. Τα PLC βρίσκουν εφαρμογή στην υλοποίηση και τον έλεγχο σύνθετων κυκλωμάτων αυτοματισμού.
Hardware του PLC (αρχιτεκτονική)
Με την έννοια Hardware εννοούμε τα ηλεκτρονικά μέρη, διαμέσου των οποίων όλες οι λειτουργίες της εγκατάστασης ή του μηχανήματος που πρόκειται να ελεγθεί διευθύνονται και ενεργοποιούνται σε μια λογική σειρά.
Ένα PLC αποτελείται από
1. τον &ίαυλο Επικοινωνίας (Bus)
2. την Μονάδα Τροφοδοσίας
3. τον Επεξεργαστή (Central Processing Unit, CPU)
4. την Μνήμη
5. την Μονάδα Επικοινωνίας
6. τις Μονάδες Εισόδων και Εξόδων
Συγκεκριμένα,
1. Ο δίαυλος επικοινωνίας εξασφαλίζει την επικοινωνία μεταξύ όλων των μερών του PLC.
Ο δίαυλος επικοινωνίας Bus, είναι ένα σύστημα μεταφορά και επεξεργασίας δεδομένων (κατά το πρότυπο λειτουργίας των Η/Υ), που διατρέχει όλη την εγκατάσταση και πάνω στον οποίο συνδέονται όλα τα ενεργά στοιχεία του συστήματος, όπως μπουτόν, διακόπτες, αισθητήρια, καθώς και στοιχεία
εξόδου που δίνουν εντολές για την ενεργοποίηση ρελέ, ηλεκτρικών βαλβίδων, ηλεκτροκινητήρων.
2. Η μονάδα τροφοδοσίας ενός PLC έχει σκοπό να δημιουργήσει από την τάση του δικτύου τροφοδοσίας τις απαραίτητες εσωτερικές τάσεις, που απαιτούνται για την τροφοδοσία των ηλεκτρονικών στοιχείων (τρανζίστορ, ολοκληρωμένα κυκλώματα κ.α.) του PLC.
3. Ο επεξεργαστής αποτελεί τον εγκέφαλο του PLC. Λαμβάνει τιμές αποθηκευμένες στην μνήμη, εκτελεί πράξεις σύμφωνα με τον κώδικα και αποθηκεύει τα αποτελέσματα ξανά στην μνήμη, οπότε και διαμορφώνεται η κατάσταση των εξόδων.
4. Στην μνήμη αποθηκεύεται το πρόγραμμα που συνθέτει ο μηχανισμός και περιέχει τα δεδομένα που χρησιμοποιούνται από το πρόγραμμα.δηλαδή ουσιαστικά χρησιμοποιείται για την αποθήκευση δεδομένων.
4. Στην μνήμη αποθηκεύεται το πρόγραμμα που συνθέτει ο μηχανισμός και περιέχει τα δεδομένα που χρησιμοποιούνται από το πρόγραμμα.δηλαδή ουσιαστικά χρησιμοποιείται για την αποθήκευση δεδομένων.
Η μνήμη της κεντρικής μονάδας διακρίνεται στην RAM, ROM και EEPROM. Κάποιες από αυτές ανήκουν στην κατηγορία των πτητικών, οι οποίες χάνουν τα δεδομένα τους που έχουν αποθηκευμένα όταν διακόπτεται η τάση και άλλες στην κατηγορία των πτητικών, δηλαδή σε εκείνες που έχουν την
δυνατότητα να διατηρούν το περιεχόμενό τους ακόμα κι όταν η τάση τροφοδοσίας δεν είναι η απαραίτητη. Οι μνήμες RAM (Random Access Memory, μνήμη τυχαίας προσπέλασης) υπάρχουν στην κεντρική μονάδα επεξεργασίας (CPU) ενός PLC και αναφέρονται και ως μνήμες γραφής- ανάγνωσης. Στην μνήμη RAM μπορούμε να γράφουμε και να σβήνουμε αλλά επειδή ανήκει στην κατηγορία των πτητικών, πάντα την τροφοδοτούμε με μια μπαταρία, συνήθως λιθίου, ώστε να μένει αναλλοίωτο στην μνήμη το πρόγραμμα του αυτοματισμού. Ουσιαστικά η μεταφορά προγράμματος από το PC στο PLC και αντίστροφα, σημαίνει την μεταφορά από την μνήμη RAM ενός συστήματος στην μνήμη RAM του άλλου συστήματος. Ο χρόνος που χρειάζεται για να διαβαστεί ή να γραφεί μια πληροφορία είναι πάντα ο ίδιος.
Στην μνήμη ROM αποθηκεύεται το λειτουργικό σύστημα του PLC, δηλαδή όλες τις απαραίτητες λειτουργίες για να δουλέψει το PLC.
Στην μνήμη EEPROM (Electicaly Eresable Programamble Read Only Memory ή ηλεκτρικά διαγραφόμενες και προγραμματιζόμενες μνήμες μόνο ανάγνωσης) μπορούμε να γράψουμε, να σβήσουμε, να ξαναγράψουμε μέσω ειδικού εξοπλισμού, καθώς η συγκεκριμένη μνήμη προγραμματίζεται και σβήνει ηλεκτρικά. Έχει το πλεονέκτημα να παραμένει η μνήμη ακόμα κι αν βγάλουμε την τροφοδοσία. Για αυτό και χρησιμοποιείται για την μόνιμη αποθήκευση προγραμμάτων.
5. Η μονάδα επικοινωνίας είναι το μέσο για την επικοινωνία του ελεγκτή προκειμένου να μεταφερθεί σε αυτόν το πρόγραμμα που πρόκειται να εκτελεστεί. Η επικοινωνία αυτή μπορεί να πραγματοποιηθεί με interfaces (διεπαφές) όπως: ο ενιαίος σειριακός δίαυλος usb, το πρωτόκολλο επικοινωνίας CANopen, το πρωτόκολλο ενσύρματης τοπικής δικτύωσης υπολογιστών Ethernet, το σειριακό πρωτόκολλο επικοινωνίας Modbus κλπ. Κάθε PLC διαθέτει σίγουρα μία διεπαφή αλλά παράλληλα έχει και επιπλέον θύρες επικοινωνίας για περιφερειακά.
6. Οι μονάδες εισόδων μεταφέρουν τις τιμές των εισόδων και οι μονάδες εξόδων μεταφέρουν την κατάσταση των εξόδων. Οι είσοδοι και οι έξοδοι αποτελούν βασικό στοιχείο επιλογής στο PLC.
Οι μονάδες των εισόδων και των εξόδων αποτελούν τις μονάδες επικοινωνίας της κεντρικής μονάδας με τους αισθητήρες, διακόπτες, μπουτόν, που δίνουν τις εντολές, καθώς και με τους ηλεκτρονόμους ισχύος των κινητήρων, τις ηλεκτρομαγνητικές βαλβίδες, τις ενδεικτικές λυχνίες και γενικά τους αποδέκτες που εκτελούν τις εντολές του αυτοματισμού.
Οι είσοδοι μετατρέπουν το ηλεκτρικό σήμα σε μια λογική ψηφιακή κατάσταση “0” ή “1” και οι έξοδοι μετατρέπουν μια λογική ψηφιακή κατάσταση σε ηλεκτρικό σήμα. Τα ψηφιακά σήματα εισόδου και εξόδου που μπορεί να δεχτεί η κεντρική μονάδα είναι χαμηλής τάσης και ρεύματος. Οι μονάδες
εισόδων και εξόδων αναλαμβάνουν να προσαρμόσουν τα σήματα εισόδου και εξόδου, που έχουμε στον αυτοματισμό, σε σήματα που μπορεί να δεχτεί η κεντρική μονάδα, σε τάση και ρεύμα. Η προσαρμογή αυτή γίνεται είτε με την χρήση ηλεκτρονικών στοιχείων ισχύος είτε με την χρήση κατάλληλων ρελέ. Οι είσοδοι και οι έξοδοι είναι ουσιαστικά οι ακροδέκτες (κλέμες, ελάσματα κ.α.)
που καταλήγει το σύστημα του PLC.
Στους διάφορους τύπους των PLC οι μονάδες εισόδων και εξόδων αντιμετωπίζονται με διαφορετικό τρόπο. Γενικά ισχύει ότι μια μονάδα εισόδων ή εξόδων μπορεί να λειτουργεί με συνεχή τάση ή με εναλλασσόμενη τάση.
Τυπικές τάσεις που συναντάμε στα PLC είναι: DC 24V, 48V, 60V και AC 24V, 48V, 115V, 230V, με συνηθέστερες τις DC 24V και AC 115V και 230V. Η τάση αυτή δεν παρέχεται συνήθως από τη μονάδα τροφοδοσίας του PLC. Πρέπει να την δημιουργήσουμε εμείς με άλλη τροφοδοτική μονάδα.
Βέβαια αν η τάση των εισόδων είναι ίδιας τάξης με αυτή των εξόδων, τότε είναι δυνατό να χρησιμοποιηθεί η ίδια τροφοδοσία για DC τάσεις, και μετασχηματιστές χειρισμού για AC τάσεις.
Βεβαίως εκτός από τα βασικά χαρακτηριστικά του, απαραίτητα είναι
• το/τα πλαίσιο/α για την τοποθέτηση των μονάδων και των επεκτάσεών τους
• ο ηλεκτρονικός υπολογιστής (Η/Υ) για τον προγραμματισμό του PLC
Επίσης υπάρχουν εκδόσεις PLC τα οποία είναι σχεδιασμένα να λειτουργούν σε περιβάλλον με μεγάλες μεταβολές θερμοκρασίας και υγρασίας και να μην επηρεάζονται από βιομηχανικά παράσιτα βλ. ηλεκτρονικός θόρυβος.
Ο προγραμματισμός τους πραγματοποιείται με γλώσσες προγραμματισμού κατάλληλες για τον σχεδιασμό του προγράμματος και η εκτέλεση του προγράμματος γίνεται με τρόπο τακτικό και σειριακό. Η επιλογή της γλώσσας προγραμματισμού εξαρτάται από την εμπειρία και την γνώση του χρήστη σε ψηφιακά ηλεκτρονικά, σε υπολογιστές, σε συστήματα αυτοματισμού που λειτουργούν με κλασικό τρόπο και φυσικά εξαρτάται από την φύση του προβλήματος που έχουμε να αντιμετωπίσουμε.
Software του PLC και πως λειτουργεί
Στην μονάδα επεξεργασίας του PLC εκτελούνται οι πράξεις που περιέχονται στις εντολές του προγράμματος. Η μνήμη του PLC, αποτελείται από bits, bytes και words, τα οποία αντιπροσωπεύουν τα εσωτερικά και εξωτερικά στοιχεία του. Για παράδειγμα όταν αναφερόμαστε στην πρώτη είσοδο, ουσιαστικά εννοούμε το συγκεκριμένο bit που σχετίζεται με την πρώτη είσοδο.
Η έννοια «διεύθυνση του PLC χρησιμοποιείται για να ξεχωρίζουμε χιλιάδες bits με τα οποία είναι δομημένο ένα PLC. Κάθε εσωτερικό ή εξωτερικό στοιχείο του PLC έχει την δική του διεύθυνση ώστε να είναι μοναδικό και εύκολα προσβάσιμο. Οι μονάδες εισόδου παίρνουν εντολές από διακόπτες, αισθητήρες ενώ οι μονάδες εξόδου δίνουν εντολές σε μοτέρ, ηλεκτρομαγνητικές βαλβίδες κλπ. Το ιδιαίτερο χαρακτηριστικό ενός PLC είναι ότι οι κανόνες που καθορίζουν την συμπεριφορά των εξόδων δεν είναι σταθεροί όπως σε έναν κλασικό πίνακα αυτοματισμού, αλλά μπορούν να μεταβάλλονται με την επέμβαση στο πρόγραμμα του PLC χωρίς όμως να επεμβαίνουμε στο hardware του συνολικού έργου, δηλαδή όλης της εγκατάστασης
Ας υποθέσουμε ότι ένα PLC βρίσκεται σε κατάσταση λειτουργίας του αυτοματισμού, η διαδικασία που ακολουθείται κατά την λειτουργία είναι η εξής:

• Η CPU διαβάζει τις εισόδους, δηλαδή «παρακολουθεί» την κάθε είσοδο και αν σε αυτή εμφανιστεί υψηλή τάση, καταχωρεί ένα λογικό ”1” σε μια περιοχή της μνήμης του που έχει δεσμευτεί για αυτό τον σκοπό, ενώ για χαμηλή τάση καταχωρεί ένα λογικό “0”. Οι τιμές “0” ή “1” για κάθε είσοδο, αποθηκεύονται σε μια περιοχή μνήμης.
• Ο μικροεπεξεργαστής παίρνοντας σαν δεδομένα τις τιμές των εισόδων που διάβασε, εκτελεί τις εντολές του προγράμματος, το οποίο λειτουργεί τον αυτοματισμό. Η εκτέλεση του προγράμματος θα δώσει αποτελέσματα για τις εξόδους. Τα αποτελέσματα αυτά αποθηκεύονται σε μια περιοχή μνήμης. Όπως και η εικόνα των εισόδων, αντίστοιχα και η εικόνα των εξόδων περιέχει την τιμή “0” ή “1” για κάθε έξοδο. Οι τιμές αυτές προκύπτουν από την εκτέλεση του προγράμματος.
• Ο μικροεπεξεργαστής αποδίδει τις τιμές της εικόνας των εξόδων στις εξόδους. Αυτό σημαίνει ότι σε όποια έξοδο έχει λογικό “0” θα δοθεί χαμηλή τάση και αντίστοιχα σε όποια έξοδο έχει λογικό “1” θα δοθεί υψηλή τάση.
Στο τέλος αυτής διαδικασίας έχει ολοκληρωθεί ένας πλήρης κύκλος λειτουργίας και η διαδικασία ξαναρχίζει από την αρχή. Ο κύκλος λειτουργίας εκτελείται συνεχώς όσο το PLC βρίσκεται σε κατάσταση RUN, ουσιαστικά δηλαδή ένα PLC εκτελεί συνεχώς τα βήματα του κύκλου λειτουργίας.
Ο χρόνος που χρειάζεται ένα PLC για να εκτελέσει έναν πλήρη κύκλο λειτουργίας, ονομάζεται χρόνος κύκλου και εξαρτάται από την ταχύτητα του μικροεπεξεργαστή αλλά και από τον αριθμό και το είδος των εντολών του προγράμματος.
Στις εισόδους συνδέονται όλα τα αισθητήρια όργανα τα οποία απαιτούνται για ένα κύκλωμα αυτοματισμού (τερματικοί, μπουτόν, διακόπτες). Ο ελεγκτής αντιλαμβάνεται αν ότι ένα αισθητήριο είναι ανοιχτό ή κλειστό από το αν εμφανίζεται συγκεκριμένη τάση στην αντίστοιχη κλέμα εισόδου. Οι τάσεις αυτές δεν παρέχονται από την μονάδα τροφοδοσίας του ελεγκτή αλλά πρέπει να δημιουργηθούν από εμάς με το κατάλληλο τροφοδοτικό (για DC) ή με μετασχηματιστή τάσης χειρισμού (για AC). Αντίστοιχα τα καλώδια που πηγαίνουν προς τα ρελέ ισχύος, βαλβίδες, λυχνίες, συνδέονται στις κλέμες εξόδου. Κατά μέσο όρο, ανάλογα τον τύπο του PLC, οι τιμές των ηλεκτρικών
ψηφιακών ή αναλογικών σημάτων, τάσεων/ρευμάτων, που προέρχονται από αυτά τα αισθητήρια, εισάγονται στο PLC και γίνεται η επεξεργασία τους με βάση συγκεκριμένες διαδικασίες και εντολές που έχει καταχωρήσει ο χρήστης (βλ. πίνακα 1). Με βάση αυτήν την επεξεργασία παράγονται κατάλληλα σήματα εξόδου με την βοήθεια των οποίων ενεργοποιούνται τα κυκλώματα ισχύος.
Πίνακας 1
Τιμές τάσεων και ρευμάτων, αναλογικών και ψηφιακών εισόδων/εξόδων
ΤΑΣΕΙΣ – ΡΕΥΜΑΤΑ
Είσοδος Έξοδος
Τάση Ρεύμα Τάση Ρεύμα
Αναλογική 0 - 10V 4 - 20mA 0 - 10v 4 - 20mV
Ψηφιακή 24V 220V Ρελέ 5mA-0.5A
Ποιοι τύποι PLC υπάρχουν
Στην αγορά υπάρχουν πολλές εταιρίες από τις οποίες μπορούμε να επιλέξουμε το κατάλληλο για εμάς PLC. Καθεμιά από αυτές διαθέτει μεγάλη γκάμα διαφορετικών PLC. Ευρέως γνωστές είναι οι παρακάτω:
Siemens, Horner, Schneider Electric, Yokogawa, Mitsubishi Electric, Beckhoff, Rockwell Automation, CMZ, Crouzet, Omega, Panasonic, Pliz, Lenze, Vipa art of automation, Sigmatek, Esitron, Sanyodenki, Leuze Electronic, Weaner Electric, Magtrol , Jetter, Simex, Selec, Auma, Chino, Systec, Elliott Group, Micatron, LS Industrial Systems, Elutions, Hitachi, Hiquel
Η σωστή επιλογή ενός PLC εξαρτάται από τον τύπο, το είδος, τα χαρακτηριστικά του κλπ.
Όσον αφορά στους τύπους, υπάρχουν δύο τύποι: PLC, οι μη επεκτάσιμοι (τύπου block) και οι επεκτάσιμοι.
Όσον αφορά στους τύπους, υπάρχουν δύο τύποι: PLC, οι μη επεκτάσιμοι (τύπου block) και οι επεκτάσιμοι.
Τα μη επεκτάσιμα PLC διαθέτουν όλες τις μονάδες τους ενσωματωμένες στο PLC, δηλαδή της τροφοδοσίας, των εισόδων και εξόδων, του Ethernet, μερικών αναλογικών εισόδων/εξόδων, του RTC (Real Time Clock).
Ο αριθμός των εισόδων και εξόδων ποικίλουν ανάλογα τις απαιτήσεις του αυτοματισμού που θέλουμε να υλοποιήσουμε. Σε κάθε ακροδέκτη του PLC αναγράφεται το όνομα της εισόδου ή της εξόδου καθώς η κάθε είσοδος και έξοδος του PLC έχει προκαθορισμένο όνομα το οποίο αναφέρεται και στο πρόγραμμα.
Αντιθέτως, στα επεκτάσιμα PLC οι διάφορες λειτουργικές μονάδες, όπως ο επεξεργαστής, το τροφοδοτικό και οι είσοδοι/έξοδοι, είναι τοποθετημένες σε
Ο αριθμός των εισόδων και εξόδων ποικίλουν ανάλογα τις απαιτήσεις του αυτοματισμού που θέλουμε να υλοποιήσουμε. Σε κάθε ακροδέκτη του PLC αναγράφεται το όνομα της εισόδου ή της εξόδου καθώς η κάθε είσοδος και έξοδος του PLC έχει προκαθορισμένο όνομα το οποίο αναφέρεται και στο πρόγραμμα.
Αντιθέτως, στα επεκτάσιμα PLC οι διάφορες λειτουργικές μονάδες, όπως ο επεξεργαστής, το τροφοδοτικό και οι είσοδοι/έξοδοι, είναι τοποθετημένες σε
ανεξάρτητες υπομονάδες. Οι υπομονάδες αυτές έχουν την δυνατότητα βυσμάτωσης πάνω σε ένα πλαίσιο στήριξης. Η αύξηση των επιμέρους μονάδων έχει σαν αποτέλεσμα να πολλαπλασιάζονται οι δυνατότητές τους και να καθίστανται ικανοί να καλύψουν πιο απαιτητικές εφαρμογές. Πλεονεκτούν
όταν χρειάζεται μεγάλος αριθμός εισόδων και εξόδων. Επίσης σε ενδεχόμενο βλάβης σε μία από τις υπομονάδες, η αντικατάσταση γίνεται χωρίς να πειραχτούν οι υπόλοιπες.
Επιπλέον για να επιλέξουμε ένα PLC λαμβάνουμε υπόψιν μας την τάση τροφοδοσίας (12Vdc, 24Vdc ή 230Vac), τον αριθμό και το είδος σημάτων των εισόδων και εξόδων, την τάση σημάτων εισόδου (ψηφιακά 24Vdc, 230Vac, αναλογικά σήματα ή τάσης ρεύματος), είδος μονάδας εξόδου (ρελέ,
τρανζίστορ, TRIAC), δυνατότητες επικοινωνίας και δικτύωσης, ευκολία στην χρήση και την εκμάθηση, τις συνθήκες που λειτουργεί πιο σωστά και σε τι αντίξοες συνθήκες μπορεί να ανταποκριθεί (θερμοκρασία, υγρασία, βροχή).
Αναλυτικότερα,
Ο αριθμός των εισόδων και εξόδων. Είναι σημαντικό να γνωρίζουμε τον ακριβή αριθμό εισόδων και εξόδων που πρόκειται να χρησιμοποιηθούν για την βέλτιστη αλλά και οικονομικότερη χρήση.
Ο τύπος των εισόδων και εξόδων. Απαραίτητο επίσης να γνωρίζουμε είναι ο τύπος των εισόδων και εξόδων, δηλαδή αν χρειαζόμαστε ψηφιακή είσοδο, όπως push buttons, ή αναλογική είσοδο, όπως ένα θερμοστοιχείο. Αντίστοιχα και για τις εξόδους, δηλαδή αν πρόκειται για ψηφιακή έξοδο, όπως ρελέ,
λάμπα ή για αναλογική έξοδο, όπως τον έλεγχο κίνησης βαλβίδων.
Το μέγεθος μνήμης. Η επιλογή της μνήμης με βάση το μέγεθός της κρίνεται σημαντική, καθώς θα πρέπει να είναι αρκετή για την δημιουργία του προγράμματος του PLC.
Τον τύπο του PLC. Όπως αναφέραμε και παραπάνω, οφείλουμε να επιλέξουμε ένα πτητικού ή μη πτητικού τύπο PLC, αναλόγως με το αν μας εξυπηρετεί στο πρόβλημα που θέλουμε να υλοποιήσουμε, να χρησιμοποιήσουμε PLC με ενσωματωμένες όλες τις μονάδες του ή όχι.
Την τάση τροφοδοσίας. Τα AC PLC λειτουργούν σε τάση τροφοδοσίας 220V, αντίθετα ένα DC PLC απαιτεί μόνο 24V για να λειτουργήσει. Συνεπώς θα πρέπει να διαλέξουμε το PLC με βάση την διαθέσιμη τάση τροφοδοσίας του πίνακα ελέγχου.
Την δυνατότητα επικοινωνίας με πολλά interfaces. Αναλόγως το είδος της διεπαφής, οφείλουμε να επιλέξουμε και το κατάλληλο PLC. &ηλαδή αν θέλουμε το PLC να επικοινωνεί με πρωτόκολλο επικοινωνίας ModBus, θα χρειαστούμε και την αντίστοιχη θύρα.
Για να επιλέξουμε το κατάλληλο PLC οφείλουμε να λάβουμε υπόψιν όλες τις παραπάνω παραμέτρους και να κατανοήσουμε πλήρως το πρόγραμμα που θέλουμε να υλοποιήσουμε.
Γλώσσες Προγραμματισμού
Όταν αναφερόμαστε σε ένα PLC, ο προγραμματισμός είναι μια από τις βασικές έννοιες που μας έρχονται στο μυαλό. Τι είναι όμως ουσιαστικά ο προγραμματισμός και πως υλοποιείται από την εκάστοτε γλώσσα προγραμματισμού;
Προγραμματισμός είναι το σύνολο των διαδικασιών σύνταξης ενός υπολογιστικού προγράμματος για την πραγματοποίηση εργασιών ή για την επίλυση ενός δεδομένου προβλήματος. Ο προγραμματισμός περιλαμβάνει επίσης τον έλεγχο του προγράμματος για την επαλήθευση της ακρίβειάς του, και την προπαρασκευή των οδηγιών με τις οποίες ένας υπολογιστής θα εκτελέσει τις εργασίες που καθορίζονται στις προδιαγραφές του προγράμματος. Θεμελιώδη ρόλο στον υπολογιστικό προγραμματισμό διαδραματίζουν οι χιλιάδες γλώσσες προγραμματισμού, δηλαδή οι κώδικες επικοινωνίας οι οποίοι απαραίτητοι για την δημιουργία ενός προγράμματος.
Με πιο απλά λόγια, προγραμματισμός ενός PLC σημαίνει να δημιουργήσουμε μια σειρά από εντολές οι οποίες λύνουν έναν συγκεκριμένο αλγόριθμο που αντιστοιχεί σε μια λειτουργία ενός συστήματος αυτοματισμού. Η διαδικασία που ακολουθείται για να γράψουμε αυτές τις εντολές αποτελεί το πρόγραμμα.
Κάθε PLC ακολουθεί συγκεκριμένες γλώσσες προγραμματισμού σύμφωνα με την αρχιτεκτονική του hardware. Θεωρητικά θα μπορούσαμε να προγραμματίσουμε ένα PLC γράφοντας εντολές σε μια γλώσσα μηχανής, κάτι που καθιστούσε όμως το PLC δύσκολο στον προγραμματισμό του και μόνο
από ανθρώπους με βαθιά γνώση στην δομή και την λειτουργία των διαφόρων επεξεργαστών θα μπορούσε να επιτευχθεί. (ς εκ τούτου λοιπόν, οι κατασκευαστές του, πρότειναν γλώσσες προγραμματισμού οι οποίες μπορούν να χρησιμοποιηθούν από ανθρώπους που σχετίζονται με τον έλεγχο συστημάτων.
Οι γλώσσες προγραμματισμού διακρίνονται σε γραφικές και μη γραφικές, ανάλογα με το είδος των στοιχείων που χρησιμοποιούν.
Οι γραφικές χρησιμοποιούν γραφικά στοιχεία που μοιάζουν αρκετά με τα σύμβολα που χρησιμοποιούνται στον κλασικό αυτοματισμό και με τα σύμβολα λογικών πυλών (AND, NOT, OR, XOR, κλπ). Οι μη γραφικές χρησιμοποιούν εντολές που η κάθε μία αντιστοιχεί σε μια εντολή της γλώσσας μηχανής. Οι γραφικές είναι πιο προσιτές σε ανθρώπους που έχουν εμπειρία στον κλασικό αυτοματισμό.
Οι γραφικές χρησιμοποιούν γραφικά στοιχεία που μοιάζουν αρκετά με τα σύμβολα που χρησιμοποιούνται στον κλασικό αυτοματισμό και με τα σύμβολα λογικών πυλών (AND, NOT, OR, XOR, κλπ). Οι μη γραφικές χρησιμοποιούν εντολές που η κάθε μία αντιστοιχεί σε μια εντολή της γλώσσας μηχανής. Οι γραφικές είναι πιο προσιτές σε ανθρώπους που έχουν εμπειρία στον κλασικό αυτοματισμό.
Συνεπώς η επιλογή της κατάλληλης γλώσσας εξαρτάται από την γνώση και την εμπειρία του εκάστοτε χρήστη στην αντίστοιχη γλώσσα ή σε γλώσσα με παρόμοια λογική. Παράλληλα ο χρήστης οφείλει να είναι γνώστης ψηφιακών ηλεκτρονικών, συστημάτων αυτοματισμού και ηλεκτρονικών υπολογιστών.
Οι βασικές γλώσσες προγραμματισμού ενός PLC είναι οι παρακάτω.
• LAD: Ladder Diagram ή &ιάγραμμα Επαφών
• STL: Statement List ή Λίστα Εντολών
• FBD: Function Block Diagram ή Γλώσσα Λογικών Γραφικών
Ladder: Η γλώσσα Ladder είναι η πρώτη γλώσσα που αναπτύχθηκε και επιτρέπει την μεταφορά του ηλεκτρολογικού σχεδίου μέσω του H/Y στο PLC. Χρησιμοποιεί τα αμερικάνικα σύμβολα των επαφών και ανήκει στην κατηγορία των γραφικών γλωσσών μηχανής.
STL: Ανήκοντας στις μη γραφικές γλώσσες, η STL είναι μια γλώσσα προγραμματισμού σε μορφή κειμένου. Έχει την ικανότητα βέλτιστης χρήσης της μνήμης και εκτέλεσης του προγράμματος. &ημιουργεί μια λίστα προγράμματος με εντολές οι οποίες αντιστοιχούν στις λογικές πύλες (AND,
OR NOT κλπ) τοποθετημένες σε γραμμές η μία κάτω από την άλλη οι οποίες καταχωρούνται με συντομογραφικό τρόπο. Σε κάθε γραμμή περιέχονται δύο στοιχεία, η εντολή και η μεταβλητή. Η εντολή, αναγράφεται με λατινικούς χαρακτήρες και μπορεί να είναι είτε εντολή φόρτωσης (Load, LD), είτε εντολή από τις εκφράσεις της άλγεβρας Boole, είτε έτοιμη ρουτίνα του ελεγκτή (πχ, χρονιστής). Η μεταβλητή συνήθως περιέχει την διεύθυνση κάποιας εισόδου ή εξόδου. Παρόλο που στην αρχή η λίστα εντολών ήταν αρκετά φτωχή και περιοριζόταν μόνο στις βασικές λογικές εντολές , σήμερα έχει εξελιχθεί πάρα πολύ και συναντά κανείς σε αυτές στοιχεία από τις γλώσσες των υπολογιστών και κυρίως των γλωσσών Assembly.
FBD: Και αυτή η γλώσσα είναι γραφική, αλλά αντί του ηλεκτρολογικού σχεδίου του αυτοματισμού, χρησιμοποιεί το αντίστοιχο λογικό κύκλωμα. Ο τρόπος αυτός χρησιμοποιεί τα λογικά σύμβολα των λογικών πυλών της άλγεβρας Βοοle με τα οποία σχεδιάζουμε λογικά κυκλώματα, CSF. SFC: είναι μια γραφική γλώσσα προγραμματισμού. Είναι μια παράλληλη γλώσσα στην οποία πολλαπλές ροές ελέγχου μπορούν να είναι ενεργές ταυτόχρονα.
Πλεονεκτήματα και Μειονεκτήματα του PLC
Πολλά τα πλεονεκτήματα, που καθιστούν ξεχωριστό στην χρήση του το PLC.
Ένα από τα βασικά χαρακτηριστικά του είναι η δυνατότητα επέκτασης του αριθμού των εισόδων και εξόδων του, με αποτέλεσμα την προσαρμογή κάθε φορά της τελικής διάταξης, ειδικά στις ανάγκες μια συγκεκριμένης εφαρμογής.
Καθώς η λογική της λειτουργίας του βασίζεται στον προγραμματισμό, είναι δυνατή η χρήση του ίδιου εξοπλισμού σε εντελώς διαφορετικές εφαρμογές.
Γενικότερα τα πλεονεκτήματα ενός PLC είναι τα εξής:
• Χαμηλό κόστος υλοποίησης του αυτοματισμού
• Μειωμένος χρόνος υλοποίησης του αυτοματισμού
• Ελαχιστοποίηση κόστους συντήρησης
• Μεγάλες δυνατότητες επέκτασης του αυτοματισμού
• Ευκολία δημιουργίας πολύπλοκων διεργασιών
• &υνατότητα σύνδεσης με κεντρικό υπολογιστικό σύστημα ή εταιρικό δίκτυο. &ηλαδή σύνδεση με πολλαπλά interfaces, όπως το Scada.
• Καταλαμβάνει ελάχιστο χώρο
• Έλεγχος σωστής λειτουργίας
• Ταχύτερη εγκατάσταση
• Χαμηλή κατανάλωση ενέργειας
Επίσης,
- Το κόστος κατασκευής του PLC είναι σημαντικά μικρότερο από το κόστος παραγωγής ενός μεγάλου αριθμού βοηθητικών ηλεκτρονόμων, χρονικών και απαριθμητών.
- Ο χρόνος κατασκευής του αυτοματισμού είναι μηδαμινός σε σχέση με την κατασκευή ενός κλασικού πίνακα αυτοματισμού.
- Ευκολία στον αυτοματισμό, καθώς με την χρήση του PLC καταργείται μεγάλο μέρος πολύπλοκων καλωδιώσεων και οι λογικές πράξεις που οδηγούν στην τελική εντολή προς τις μονάδες ισχύος, εκτελούνται ταχύτατα από τον μικροεπεξεργαστή.
- Ευελιξία στην τροποποίηση της λειτουργίας του αυτοματισμού. &ηλαδή αν θέλουμε να κάνουμε αλλαγή στον αυτοματισμό, αυτή μπορεί να γίνει αρκετά γρήγορα αρκεί να αλλάξουμε μόνο το πρόγραμμα.
- Χρησιμοποιώντας το PLC έχουμε δυνατότητα σύνδεσης με Η/Υ και παράλληλα παρακολούθηση του αυτοματισμού από απόσταση μέσω modem, δικτύου, GSM και άλλων πρωτοκόλλων.
Γενικά τα PLC παρέχουν την δυνατότητα σύνδεσης, προγραμματισμού και παρακολούθησης της ροής του προγράμματος με αποτέλεσμα να γίνεται ευνοικότερος ο έλεγχος, ο συντονισμός και οποιαδήποτε σύνθετη διαδικασία αυτομάτου ελέγχου. Ένα από αυτά τα συστήματα είναι το SCADA
(supervisory control and data acquisition).
Το PLC ποικίλει σε πλεονεκτήματα εν αντιθέσει με τα μειονεκτήματα. Παρ' όλα αυτά σαν μειονέκτημα θα μπορούσε να θεωρηθεί η έλλειψη επαρκούς γνώσης των τεχνικών, ειδικά στην Ελλάδα, πράγμα που καθιστά δύσκολη και με προβλήματα την εφαρμογή των PLC. Αντίστοιχα ο προγραμματισμός μπορεί να γίνει μόνο από άτομα με γνώσεις προγραμματισμού PLC.
Ένα από τα κυριότερα μειονεκτήματα των PLC είναι η Ηλεκτρομαγνητική παρεμβολή, γιατί στον χώρο εγκατάστασης είναι πιθανό να υπάρχουν ηλεκτρομαγνητικά πεδία τα οποία είναι ικανά να δημιουργήσουν παρεμβολές και στην λειτουργία του PLC. Το ηλεκτρομαγνητικό πεδίο είναι ένα φυσικό πεδίο που παράγεται από ηλεκτρικά φορτισμένα αντικείμενα. Επηρεάζει τη συμπεριφορά των φορτισμένων αντικειμένων στην περιοχή του πεδίου. Το ηλεκτρικό πεδίο επεκτείνεται επ’άπειρον στο χώρο και περιγράφει τις ηλεκτρομαγνητικές αλληλεπιδράσεις. Είναι μια από τις θεμελιώδεις αλληλεπιδράσεις στη φύση, εκ των οποίων οι υπόλοιπες είναι η βαρύτητα, η ασθενής αλληλεπίδραση και η ισχυρή αλληλεπίδραση. Το ηλεκτρομαγνητικό πεδίο μπορεί να εκφραστεί ως ο συνδυασμός ενός ηλεκτρικού πεδίου, το οποίο παράγεται από στατικά φορτία και ενός μαγνητικού πεδίου, το οποίο παράγεται από κινούμενα φορτία. Γι' αυτό και είναι απαραίτητο να προστατεύουμε τον ελεγκτή μας με περίβλημα από ατσάλι, αν οι αιτίες παρεμβολής που προκαλούνται από μεγάλους αγωγούς και να τον τοποθετούμε μακριά από τις πηγές αυτές.























Aς δούμε ένα παράδειγμα και στις 3 γλώσσες προγραμματισμού





Κανόνες μετατροπής σχεδίων κλασσικών κυκλωμάτων αυτοματισμού σε γλώσσα FBD μέσα από παραδείγματα

Τι είναι το PLC (Programmable Logic Controller)
Η προγραμματιζόμενη μονάδα λογικού ελέγχου ή προγραμματιζόμενος λογικός ελεγκτής (PLC), είναι ένας ψηφιακός υπολογιστής που χρησιμοποιείται για την αυτοματοποίηση των ηλεκτρομηχανολογικών διαδικασιών. Η μεγαλύτερη ίσως διαφοροποίησή τους είναι ότι στα PLC τα κυκλώματα αυτοματισμού δεν υλοποιούνται με την γνωστή (συρματωμένη τεχνική) αλλά με πρόγραμμα φορτωμένο στη μνήμη του (προγραμματιζόμενη τεχνική). Τα PLC δηλαδή είναιμικρουπολογιστικά συστήματα, που με το κατάλληλο προγραμματισμό λογικών εξισώσεων, επιλύουν προβλήματα αυτοματοποίησης. Με άλλα λόγια είναι μια κατηγορία συσκευών που η λειτουργία του βασίζεται στην χρήση μικροεπεξεργαστών ανάλογων με αυτούς που χρησιμοποιούνται στους ηλεκτρονικούς υπολογιστές. Τα PLC βρίσκουν εφαρμογή στην υλοποίηση και τον έλεγχο σύνθετων αλλά και απλούστερων κυκλωμάτων αυτοματισμού.
Γλώσσες Προγραμματισμού
Όταν αναφερόμαστε σε ένα PLC, ο προγραμματισμός είναι μια από τις βασικές έννοιες που μας έρχονται στο μυαλό. Τι είναι όμως ουσιαστικά ο προγραμματισμός και πως υλοποιείται από την εκάστοτε γλώσσα προγραμματισμού;
Προγραμματισμός είναι το σύνολο των διαδικασιών σύνταξης ενός υπολογιστικού προγράμματος για την πραγματοποίηση εργασιών ή για την επίλυση ενός δεδομένου προβλήματος. Ο προγραμματισμός περιλαμβάνει επίσης τον έλεγχο του προγράμματος για την επαλήθευση της ακρίβειάς του, και την προπαρασκευή των οδηγιών με τις οποίες ένας υπολογιστής θα εκτελέσει τις εργασίες που καθορίζονται στις προδιαγραφές του προγράμματος. Θεμελιώδη ρόλο στον υπολογιστικό προγραμματισμό διαδραματίζουν οι χιλιάδες γλώσσες προγραμματισμού, δηλαδή οι κώδικες επικοινωνίας οι οποίοι είναι απαραίτητοι για την δημιουργία ενός προγράμματος.
Με πιο απλά λόγια, προγραμματισμός ενός PLC σημαίνει να δημιουργήσουμε μια σειρά από εντολές οι οποίες λύνουν έναν συγκεκριμένο αλγόριθμο που αντιστοιχεί σε μια λειτουργία ενός συστήματος αυτοματισμού. Η διαδικασία που ακολουθείται για να γράψουμε αυτές τις εντολές αποτελεί το πρόγραμμα.
Κάθε PLC ακολουθεί συγκεκριμένες γλώσσες προγραμματισμού σύμφωνα με την αρχιτεκτονική του hardware. Θεωρητικά θα μπορούσαμε να προγραμματίσουμε ένα PLC γράφοντας εντολές σε μια γλώσσα μηχανής, κάτι που θα καθιστούσε όμως το PLC δύσκολο στον προγραμματισμό του και μόνο από ανθρώπους με βαθιά γνώση στην δομή και την λειτουργία των διαφόρων επεξεργαστών. Ως εκ τούτου λοιπόν, οι κατασκευαστές του, πρότειναν γλώσσες προγραμματισμού οι οποίες μπορούν να χρησιμοποιηθούν από ανθρώπους που σχετίζονται με τον έλεγχο συστημάτων.
Οι γλώσσες προγραμματισμού διακρίνονται σε γραφικές και μη γραφικές, ανάλογα με το είδος των στοιχείων που χρησιμοποιούν οι οποίες υπακούουν στα διεθνή πρότυπα IEC 1131-3..
Οι γραφικές χρησιμοποιούν γραφικά στοιχεία που μοιάζουν αρκετά με τα σύμβολα που χρησιμοποιούνται στον κλασικό αυτοματισμό και με τα σύμβολα λογικών πυλών (AND, NOT, OR, XOR, κλπ). Οι μη γραφικές χρησιμοποιούν εντολές που η κάθε μία αντιστοιχεί σε μια εντολή της γλώσσας μηχανής. Οι γραφικές είναι πιο προσιτές σε ανθρώπους που έχουν εμπειρία στον κλασικό αυτοματισμό.
Συνεπώς η επιλογή της κατάλληλης γλώσσας εξαρτάται από την γνώση και την εμπειρία του εκάστοτε χρήστη στην αντίστοιχη γλώσσα ή σε γλώσσα με παρόμοια λογική. Παράλληλα ο χρήστης οφείλει να είναι γνώστης ψηφιακών ηλεκτρονικών, συστημάτων αυτοματισμού και ηλεκτρονικών υπολογιστών.
Οι βασικές γλώσσες προγραμματισμού ενός PLC είναι οι παρακάτω:
• LAD: Ladder Diagram ή διάγραμμα Επαφών• STL: Statement List ή Λίστα Εντολών• FBD: Function Block Diagram ή Γλώσσα Λογικών Γραφικών
Ladder: Η γλώσσα Ladder είναι η πρώτη γλώσσα που αναπτύχθηκε και επιτρέπει την μεταφορά του ηλεκτρολογικού σχεδίου μέσω του H/Y στο PLC. Χρησιμοποιεί τα αμερικάνικα σύμβολα των επαφών και ανήκει στην κατηγορία των γραφικών γλωσσών μηχανής.
STL: Ανήκοντας στις μη γραφικές γλώσσες, η STL είναι μια γλώσσα προγραμματισμού σε μορφή κειμένου. Έχει την ικανότητα βέλτιστης χρήσης της μνήμης και εκτέλεσης του προγράμματος. Δημιουργεί μια λίστα προγράμματος με εντολές οι οποίες αντιστοιχούν στις λογικές πύλες (AND, OR, NOT κλπ) τοποθετημένες σε γραμμές η μία κάτω από την άλλη οι οποίες καταχωρούνται με συντομογραφικό τρόπο. Σε κάθε γραμμή περιέχονται δύο στοιχεία, η εντολή και η μεταβλητή. Η εντολή, αναγράφεται με λατινικούς χαρακτήρες και μπορεί να είναι είτε εντολή φόρτωσης (Load, LD), είτε εντολή από τις εκφράσεις της άλγεβρας Boole, είτε έτοιμη ρουτίνα του ελεγκτή (πχ, χρονιστής). Η μεταβλητή συνήθως περιέχει την διεύθυνση κάποιας εισόδου ή εξόδου. Παρόλο που στην αρχή η λίστα εντολών ήταν αρκετά φτωχή και περιοριζόταν μόνο στις βασικές λογικές εντολές , σήμερα έχει εξελιχθεί πάρα πολύ και συναντά κανείς σε αυτές στοιχεία από τις γλώσσες των υπολογιστών και κυρίως των γλωσσών Assembly.
FBD: Και αυτή η γλώσσα είναι γραφική, αλλά αντί του ηλεκτρολογικού σχεδίου του αυτοματισμού, χρησιμοποιεί το αντίστοιχο λογικό κύκλωμα. Ο τρόπος αυτός χρησιμοποιεί τα λογικά σύμβολα των λογικών πυλών της άλγεβρας Βοοle με τα οποία σχεδιάζουμε λογικά κυκλώματα, CSF. SFC: είναι μια γραφική γλώσσα προγραμματισμού. Είναι μια παράλληλη γλώσσα στην οποία πολλαπλές ροές ελέγχου μπορούν να είναι ενεργές ταυτόχρονα.
Στα περισσότερα PLC δίνεται η δυνατότητα να προγραμματίζονται και με τις τρεις τεχνικές (γλώσσες). Η επιλογή της τεχνικής δηλαδή είναι θέμα μόνο του εκάστοτε προγραμματιστή. Επίσης σημαντικό γεγονός είναι και η συμβατότητα των τριών τεχνικών. Δηλαδή το πρόγραμμα της μιας τεχνικής μετατρέπεται αμέσως σε πρόγραμμα της άλλης τεχνικής.
Εμείς στο άρθρο αυτό θα ασχοληθούμε μέσα από παραδείγματα με τη γλώσσα λογικών γραφικών FBD και τη χρησιμοποίησή της για τη μετατροπή ηλεκτρολογικών σχεδίων αυτοματισμού σε σχέδια με λογικές πύλες.Βέβαια εδώ να πούμε ότι το ηλεκτρολογικό σχέδιο ενός αυτοματισμού δεν είναι απαραίτητο ώστε να αναπτυχθεί ένα πρόγραμμα σε FBD. Μπορούμε να δημιουργήσουμε ένα κύκλωμα αυτοματισμού σε γλώσσα λογικών γραφικών με τη βοήθεια της άλγεβρας Boole και με αρκετή εμπειρία πολύ πιο εύκολα από το να μετατρέψουμε ένα έτοιμο ηλεκτρολογικό σχέδιο στη γλώσσα αυτή. Αυτό όμως είναι ένα άλλο κομμάτι που δεν θα ασχοληθούμε εδώ. Δεν θα ασχοληθούμε δηλαδή με τη δημιουργία αλλά με τη μετατροπή.
Οι εταιρείες κατασκευής PLC στην αρχή απέφευγαν να υιοθετήσουν αυτή τη γλώσσα γιατί το τεχνικό κατεστημένο της βιομηχανίας δεν είχε γνώσεις πάνω στα λογικά κυκλώματα. Σήμερα βέβαια αυτό έχει αλλάξει και οι τεχνικοί είναι γνώστες των λογικών διαγραμμάτων με αποτέλεσμα όλες οι εταιρείες πλέον να έχουν υιοθετήσει και αυτή τη γλώσσα στον προγραμματισμό των PLC που κατασκευάζουν.
Αυτό που χρειαζόμαστε να ξέρουμε για τη μετατροπή ενός κυκλώματος αυτοματισμού σε γλώσσα FBD είναι η κατανόηση και η λειτουργία των παρακάτω τριών λογικών πυλών.
Μία λογική πύλη είναι ηλεκτρονικό κύκλωμα το οποίο πραγματοποιεί μία λογική πράξη στις εισόδους της και παράγει μία έξοδο. Οι λογικές πύλες έχουν δημιουργηθεί για να δουλεύουν στο δυαδικό σύστημα.
Οι λογικές είναι ηλεκτρονικά κυκλώματα που σήμερα κυκλοφορούν σε ολοκληρωμένη μορφή (ολοκληρωμένα κυκλώματα)Σε κάθε πύλη μπορούμε να δούμε:
Τους ακροδέκτες τροφοδοσίας του ολοκληρωμένου κυκλώματος. Τους ακροδέκτες εισόδων και τον ακροδέκτη της εξόδου
Στις εισόδους εφαρμόζεται ηλεκτρική τάση που μπορεί να πάρει δύο τιμές:‘’Λογικό 1’’ όταν εφαρμόζεται τάση π.χ 5V DC ανάλογα με το είδος των ολοκληρωμένων κυκλωμάτων.‘’Λογικό 0’’ όταν εφαρμόζεται τάση 0V
Στην πράξη το λογικό ‘’1’’ αντιστοιχεί σε τάσεις 3.5V - 5V, ενώ το λογικό ‘’0’’ σε τάσεις 0V – 1.5V.
Οι είσοδοι μετατρέπουν το ηλεκτρικό σήμα σε μια λογική ψηφιακή κατάσταση “0” ή “1” και οι έξοδοι μετατρέπουν μια λογική ψηφιακή κατάσταση σε ηλεκτρικό σήμα
Οι βασικές πύλες που αντιστοιχούν στις τρεις θεμελιώδεις λογικές πράξεις και τις οποίες χρειαζόμαστε είναι:
ΠΥΛΗ AND (ΚΑΙ)
Οι λογικές μεταβλητές που συνδέονται με την λογική πράξη AND, δίνουν αποτέλεσμα αληθή, τότε και μόνον τότε όταν όλες οι λογικές μεταβλητές είναι αληθείς. Δηλαδή η πύλη AND θα βγάλει έξοδο ‘’1’’ μόνον όταν όλες οι είσοδοι δώσουν σήμα ‘’1’’.


ΠΥΛΗ OR (ή)Η έξοδος της πύλης OR έχει λογική κατάσταση ‘’1’’ όταν τουλάχιστον μία από τις εισόδους της έχει λογική κατάσταση ‘’1’’. Ή διαφορετικά η έξοδος της πύλης OR έχει λογική κατάσταση ‘’0’’ όταν όλες οι είσοδοι της πύλης έχουν λογική κατάσταση ‘’0’’.

ΠΥΛΗ ΝΟΤ (άρνηση)
Η λογική πράξη NOT, εφαρμόζεται σε μια μόνο μεταβλητή και δίνει αποτέλεσμα αληθή, μόνο όταν η ίδια είναι ψευδής. Δηλαδή όταν η είσοδος της ΝΟΤ έχει τιμή ‘’1’’ η έξοδος έχει τιμή ‘’0’’ και αντίστροφα.


Ας ξεκινήσουμε λοιπόν με το τι είναι οι είσοδοι και οι έξοδοι σε ένα PLC
Ο σκοπός των ψηφιακών εισόδων είναι να ενημερώνουν συνεχώς τη CPU (κεντρική μονάδα επεξεργασίας) του PLCγια την κατάσταση του συστήματος. Αν δηλαδή έχει ενεργοποιηθεί κάποια διεργασία ή αν ο χειριστής ενεργοποίησε κάποιο διακόπτη. Αυτά τα δεδομένα μεταφέρονται μέσω ηλεκτρικού σήματος σε κλέμμες της συστοιχίας εισόδων, επεξεργάζονται και αποθηκεύονται στη μνήμη αναπαράστασης εισόδων.
Ο σκοπός των ψηφιακών εξόδων είναι να λαμβάνουν τις αποφάσεις της CPU και να τις μετατρέπουν σε εντολές προς το σύστημα. Αυτές οι αποφάσεις βρίσκονται αποθηκευμένες στη μνήμη αναπαράστασης των εξόδων της CPU και κατόπιν μορφοποιούνται σε ηλεκτρικά σήματα από τις μονάδες εξόδων. Οι μονάδες εξόδων δουλεύουν σαν διακόπτες παίρνοντας ή όχι τάση από την υλοποίηση του προγράμματος που εκτελεί η CPU. Όταν κλείσει ο διακόπτης το σήμα περνά προς το υπόλοιπο σύστημα.
Ο σκοπός των ψηφιακών εισόδων είναι να ενημερώνουν συνεχώς τη CPU (κεντρική μονάδα επεξεργασίας) του PLCγια την κατάσταση του συστήματος. Αν δηλαδή έχει ενεργοποιηθεί κάποια διεργασία ή αν ο χειριστής ενεργοποίησε κάποιο διακόπτη. Αυτά τα δεδομένα μεταφέρονται μέσω ηλεκτρικού σήματος σε κλέμμες της συστοιχίας εισόδων, επεξεργάζονται και αποθηκεύονται στη μνήμη αναπαράστασης εισόδων.
Ο σκοπός των ψηφιακών εξόδων είναι να λαμβάνουν τις αποφάσεις της CPU και να τις μετατρέπουν σε εντολές προς το σύστημα. Αυτές οι αποφάσεις βρίσκονται αποθηκευμένες στη μνήμη αναπαράστασης των εξόδων της CPU και κατόπιν μορφοποιούνται σε ηλεκτρικά σήματα από τις μονάδες εξόδων. Οι μονάδες εξόδων δουλεύουν σαν διακόπτες παίρνοντας ή όχι τάση από την υλοποίηση του προγράμματος που εκτελεί η CPU. Όταν κλείσει ο διακόπτης το σήμα περνά προς το υπόλοιπο σύστημα.
Οι αναλογικές είσοδοι υλοποιούν παρόμοια λειτουργία με τις μονάδες ψηφιακών εισόδων. Βέβαια σε αυτή τη περίπτωση μπορούν να διαβαστούν συνεχείς τιμές τάσης. Αυτό σημαίνει ότι μια μονάδα αναλογικών εισόδων αντιλαμβάνεται τις τιμές ενός αναλογικού σήματος π.χ. εύρους 0-10V και τις αντιστοιχεί με ένα ακέραιο αριθμό από 0-255. Βέβαια πριν τις αναλογικές εισόδους θα πρέπει να παρεμβάλλεται ένας μετατροπέας σήματος, ώστε το σήμα να παίρνει αποδεκτές τιμές τάσης ή έντασης οι οποίες θα είναι κατανοητές από τη μονάδα εισόδων.
Οι αναλογικές έξοδοι λειτουργούν κατά αντιστοιχία με τις μονάδες ψηφιακών εξόδων. Ο ρόλος τους είναι να μετατρέψουν το δυαδικό αριθμητικό μέγεθος από τη CPU του λογικού ελεγκτή σε σήμα αντίστοιχης τάσης ή έντασης ρεύματος, με σκοπό την απευθείας ενεργοποίηση συνδεδεμένων μηχανών. Τα χαρακτηριστικά των αναλογικών εξόδων βρίσκονται σε πλήρη αρμονία με αυτά των αναλογικών εισόδων μιας και εκτελούν την αντίστροφη λειτουργία. Πάντα σε συνεργασία με το πρόγραμμα αυτοματισμού.
Οι αναλογικές έξοδοι λειτουργούν κατά αντιστοιχία με τις μονάδες ψηφιακών εξόδων. Ο ρόλος τους είναι να μετατρέψουν το δυαδικό αριθμητικό μέγεθος από τη CPU του λογικού ελεγκτή σε σήμα αντίστοιχης τάσης ή έντασης ρεύματος, με σκοπό την απευθείας ενεργοποίηση συνδεδεμένων μηχανών. Τα χαρακτηριστικά των αναλογικών εξόδων βρίσκονται σε πλήρη αρμονία με αυτά των αναλογικών εισόδων μιας και εκτελούν την αντίστροφη λειτουργία. Πάντα σε συνεργασία με το πρόγραμμα αυτοματισμού.
Ποια εξαρτήματα ενός αυτοματισμού θεωρούμε σαν εισόδους και ποια σαν εξόδους και πως τα χαρακτηρίζουμε κατά τη μετατροπή ενός κυκλώματος κλασσικού αυτοματισμού σε γλώσσα FBD;
ΕΙΣΟΔΟΙ: Είναι όλα τα εξαρτήματα ενός αυτοματισμού που δίνουν εντολή. Τέτοια είναι τα μπουτόν, οι διακόπτες, τερματικά και όλα τα αισθητήρια (οι βοηθητικές επαφές τους) όπως θερμικά, φωτοκύτταρα, ανιχνευτές κίνησης κλπ.
Τις εισόδους τις χαρακτηρίζουμε με το γράμμα Ι και με ένα αύξοντα αριθμό ανάλογα σε ποια είσοδο του PLC θα το βάλουμε, δηλαδή Ι1, Ι2, Ι3…κοκ.
ΕΙΣΟΔΟΙ: Είναι όλα τα εξαρτήματα ενός αυτοματισμού που δίνουν εντολή. Τέτοια είναι τα μπουτόν, οι διακόπτες, τερματικά και όλα τα αισθητήρια (οι βοηθητικές επαφές τους) όπως θερμικά, φωτοκύτταρα, ανιχνευτές κίνησης κλπ.
Τις εισόδους τις χαρακτηρίζουμε με το γράμμα Ι και με ένα αύξοντα αριθμό ανάλογα σε ποια είσοδο του PLC θα το βάλουμε, δηλαδή Ι1, Ι2, Ι3…κοκ.
ΕΞΟΔΟΙ: Είναι όλοι οι καταναλωτές. Τέτοιοι είναι τα ρελέ ισχύος (τα πηνία τους), οι ενδεικτικές λυχνίες, οι σειρήνες , βαλβίδες κλπ.
Τις εξόδους τις χαρακτηρίζουμε με το γράμμα Q ή Ο και με ένα αύξοντα αριθμό ανάλογα σε ποια έξοδο του PLC θα το βάλουμε, δηλαδή Q1, Q2, Q3…κοκ.ΠΡΟΣΟΧΗ: Τα βοηθητικά ρελέ που τα θεωρούμε βοηθητικές μνήμες, δεν είναι υλικά που θα τα τοποθετήσουμε αυτούσια όπως στον κλασσικό αυτοματισμό, αλλά περιέχονται μέσα στο PLC. To ίδιο συμβαίνει με τα χρονικά και τα counter.
Δηλαδή θέλω να πω ότι για να δημιουργήσουμε έναν αυτοματισμό με PLC δεν θα αγοράσουμε βοηθητικά ρελέ, χρονικά και counter. Όλα αυτά περιέχονται μέσα στο PLC.
Έτσι τα βοηθητικά ρελέ είναι θέσεις μνήμης στις οποίες αποθηκεύονται ενδιάμεσες λογικές καταστάσεις και πληροφορίες.Τα χαρακτηρίζουμε σαν Markers ή flags με το γράμμα Μ ή F και με ένα αύξοντα αριθμό, δηλαδή Μ1, Μ2, Μ3 κοκ.
Τα χρονικά τα χαρακτηρίζουμε με το γράμμα Τ και με ένα αύξοντα αριθμό, δηλαδή Τ1, Τ2, Τ3 κοκ.
Τα counters τα χαρακτηρίζουμε με το γράμμα C και με ένα αύξοντα αριθμό, δηλαδή C1, C2, C3 κοκ.
Τις εξόδους τις χαρακτηρίζουμε με το γράμμα Q ή Ο και με ένα αύξοντα αριθμό ανάλογα σε ποια έξοδο του PLC θα το βάλουμε, δηλαδή Q1, Q2, Q3…κοκ.ΠΡΟΣΟΧΗ: Τα βοηθητικά ρελέ που τα θεωρούμε βοηθητικές μνήμες, δεν είναι υλικά που θα τα τοποθετήσουμε αυτούσια όπως στον κλασσικό αυτοματισμό, αλλά περιέχονται μέσα στο PLC. To ίδιο συμβαίνει με τα χρονικά και τα counter.
Δηλαδή θέλω να πω ότι για να δημιουργήσουμε έναν αυτοματισμό με PLC δεν θα αγοράσουμε βοηθητικά ρελέ, χρονικά και counter. Όλα αυτά περιέχονται μέσα στο PLC.
Έτσι τα βοηθητικά ρελέ είναι θέσεις μνήμης στις οποίες αποθηκεύονται ενδιάμεσες λογικές καταστάσεις και πληροφορίες.Τα χαρακτηρίζουμε σαν Markers ή flags με το γράμμα Μ ή F και με ένα αύξοντα αριθμό, δηλαδή Μ1, Μ2, Μ3 κοκ.
Τα χρονικά τα χαρακτηρίζουμε με το γράμμα Τ και με ένα αύξοντα αριθμό, δηλαδή Τ1, Τ2, Τ3 κοκ.
Τα counters τα χαρακτηρίζουμε με το γράμμα C και με ένα αύξοντα αριθμό, δηλαδή C1, C2, C3 κοκ.
Ας μετατρέψουμε τα πρώτα μας κυκλώματα
ΠΑΡΑΔΕΙΓΜΑ 1
Στο παρακάτω κύκλωμα (σχήμα 1) έχουμε 3 διακόπτες σε σειρά S1, S2, S3 και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν και οι τρεις διακόπτες θα κλείσουν, δηλαδή το Q1 θα πάρει σήμα 1 όταν και οι τρεις διακόπτες δώσουν σήμα 1.
Όταν έχουμε τέτοια στοιχεία συνδεδεμένα σε σειρά τότε τα βάζουμε σαν εισόδους σε μια πύληAND (3 διακόπτες) και την έξοδο της πύλης την οδηγούμε στην έξοδο του κυκλώματος (λάμπα) όπως φαίνεται στο παρακάτω σχήμα 1. Παρατηρείστε ότι η μετατροπή του κυκλώματος σε γλώσσα FBD είναι η ίδια είτε οι διακόπτες στο αρχικό κύκλωμα είναι κλειστοί είτε είναι ανοικτοί (σχήματα 1α και 1β).

ΠΑΡΑΔΕΙΓΜΑ 1
Στο παρακάτω κύκλωμα (σχήμα 1) έχουμε 3 διακόπτες σε σειρά S1, S2, S3 και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν και οι τρεις διακόπτες θα κλείσουν, δηλαδή το Q1 θα πάρει σήμα 1 όταν και οι τρεις διακόπτες δώσουν σήμα 1.
Όταν έχουμε τέτοια στοιχεία συνδεδεμένα σε σειρά τότε τα βάζουμε σαν εισόδους σε μια πύληAND (3 διακόπτες) και την έξοδο της πύλης την οδηγούμε στην έξοδο του κυκλώματος (λάμπα) όπως φαίνεται στο παρακάτω σχήμα 1. Παρατηρείστε ότι η μετατροπή του κυκλώματος σε γλώσσα FBD είναι η ίδια είτε οι διακόπτες στο αρχικό κύκλωμα είναι κλειστοί είτε είναι ανοικτοί (σχήματα 1α και 1β).

ΠΑΡΑΔΕΙΓΜΑ 2
Στο παρακάτω κύκλωμα (σχήμα 2) έχουμε 3 διακόπτες παράλληλα S1, S2, S3 και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν ένας (τουλάχιστον) οποιοσδήποτε από τους τρεις διακόπτες θα κλείσει , δηλαδή το Q1 θα πάρει σήμα 1 όταν ένας (τουλάχιστον) οποιοσδήποτε από τους τρεις διακόπτες δώσει σήμα 1.
Όταν έχουμε τέτοια στοιχεία συνδεδεμένα παράλληλα τότε τα βάζουμε σαν εισόδους σε μια πύληOR (3 διακόπτες) και την έξοδο της πύλης την οδηγούμε στην έξοδο του κυκλώματος (λάμπα) όπως φαίνεται στο παρακάτω σχήμα 2.

Στο παρακάτω κύκλωμα (σχήμα 2) έχουμε 3 διακόπτες παράλληλα S1, S2, S3 και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν ένας (τουλάχιστον) οποιοσδήποτε από τους τρεις διακόπτες θα κλείσει , δηλαδή το Q1 θα πάρει σήμα 1 όταν ένας (τουλάχιστον) οποιοσδήποτε από τους τρεις διακόπτες δώσει σήμα 1.
Όταν έχουμε τέτοια στοιχεία συνδεδεμένα παράλληλα τότε τα βάζουμε σαν εισόδους σε μια πύληOR (3 διακόπτες) και την έξοδο της πύλης την οδηγούμε στην έξοδο του κυκλώματος (λάμπα) όπως φαίνεται στο παρακάτω σχήμα 2.

ΠΑΡΑΔΕΙΓΜΑ 3
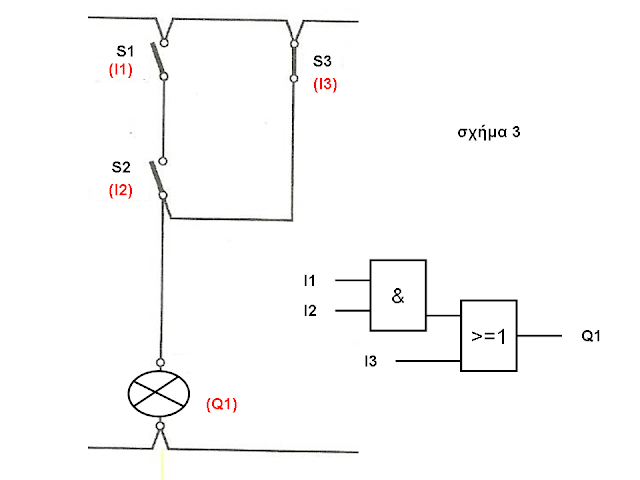
Στο παρακάτω κύκλωμα (σχήμα 3) έχουμε 2 διακόπτες σε σειρά S1, S2 και αυτοί είναι παράλληλα συνδεδεμένοι με ένα άλλο διακόπτη S3, καθώς και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Ένας κανόνας που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR. Σε αυτό το παράδειγμα δεν μπορούμε.
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1.
Η λάμπα θα ανάψει όταν και οι δύο διακόπτες S1 και S2 θα κλείσουν ή όταν κλείσει μόνο ο διακόπτης S3.
Σε αυτή την περίπτωση θα πάρουμε μια πύλη AND με εισόδους τους δύο διακόπτες S1, S2 που είναι συνδεδεμένοι σε σειρά.
Στη συνέχεια θα πάρουμε μια πύλη OR με εισόδους την έξοδο της AND και το διακόπτη S3. Η έξοδος της OR θα δώσει στο Q1 όπως φαίνεται στο παρακάτω σχήμα 3.
Στο παρακάτω κύκλωμα (σχήμα 3) έχουμε 2 διακόπτες σε σειρά S1, S2 και αυτοί είναι παράλληλα συνδεδεμένοι με ένα άλλο διακόπτη S3, καθώς και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Ένας κανόνας που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR. Σε αυτό το παράδειγμα δεν μπορούμε.
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1.
Η λάμπα θα ανάψει όταν και οι δύο διακόπτες S1 και S2 θα κλείσουν ή όταν κλείσει μόνο ο διακόπτης S3.
Σε αυτή την περίπτωση θα πάρουμε μια πύλη AND με εισόδους τους δύο διακόπτες S1, S2 που είναι συνδεδεμένοι σε σειρά.
Στη συνέχεια θα πάρουμε μια πύλη OR με εισόδους την έξοδο της AND και το διακόπτη S3. Η έξοδος της OR θα δώσει στο Q1 όπως φαίνεται στο παρακάτω σχήμα 3.

ΠΑΡΑΔΕΙΓΜΑ 4
Στο παρακάτω κύκλωμα (σχήμα 4) έχουμε 2 διακόπτες παράλληλα S1, S2 και αυτοί είναι σε σειρά συνδεδεμένοι με ένα άλλο διακόπτη S3, καθώς και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Θυμίζω τον κανόνα που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR. Σε αυτό το παράδειγμα μπορούμε.
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν ένας από τους δύο διακόπτες S1 και S2 θα κλείσει και μαζί με την προηγούμενη συνθήκη όταν κλείσει και ο διακόπτης S3.
Σε αυτή την περίπτωση θα πάρουμε μια πύλη OR με εισόδους τους δύο διακόπτες S1, S2 που είναι συνδεδεμένοι παράλληλα.
Στη συνέχεια θα πάρουμε μια πύλη AND με εισόδους την έξοδο της OR και το διακόπτη S3. H έξοδος της AND θα δώσει στο Q1 όπως φαίνεται στο παρακάτω σχήμα 4.

Στο παρακάτω κύκλωμα (σχήμα 4) έχουμε 2 διακόπτες παράλληλα S1, S2 και αυτοί είναι σε σειρά συνδεδεμένοι με ένα άλλο διακόπτη S3, καθώς και μια λάμπα, δηλαδή έχουμε 3 εισόδους (3 διακόπτες) και 1 έξοδο (λάμπα).
Θυμίζω τον κανόνα που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR. Σε αυτό το παράδειγμα μπορούμε.
Χαρακτηρίζουμε τις εισόδους σαν Ι1, Ι2, Ι3 και την έξοδο σαν Q1
Η λάμπα θα ανάψει όταν ένας από τους δύο διακόπτες S1 και S2 θα κλείσει και μαζί με την προηγούμενη συνθήκη όταν κλείσει και ο διακόπτης S3.
Σε αυτή την περίπτωση θα πάρουμε μια πύλη OR με εισόδους τους δύο διακόπτες S1, S2 που είναι συνδεδεμένοι παράλληλα.
Στη συνέχεια θα πάρουμε μια πύλη AND με εισόδους την έξοδο της OR και το διακόπτη S3. H έξοδος της AND θα δώσει στο Q1 όπως φαίνεται στο παρακάτω σχήμα 4.

ΠΑΡΑΔΕΙΓΜΑ 5
Μετά από αυτά ας προχωρήσουμε στο παρακάτω ολοκληρωμένο κύκλωμα ενός απλού αυτόματου κινητήρα μεstart-stop. Δεν έχουμε βάλει το θερμικό και θα δούμε μετά και αυτή την περίπτωση. Το κύκλωμα αποτελείται από ένα κλάδο (σχήμα 5)
Έχω δύο εισόδους, τα μπουτόν stop S1 και start S2 και τις οποίες χαρακτηρίζω σαν Ι1 και Ι2 αντίστοιχα και επίσης μια έξοδο, το πηνίο του ρελέ ισχύος Κ1Μ που την χαρακτηρίζω σαν Q1.
Εκτός από αυτά βλέπω ότι έχω και μια βοηθητική επαφή (13-14) του ρελέ ισχύος την οποία θα πρέπει να χαρακτηρίσω και αυτή.
Όλες τις βοηθητικές επαφές που ανήκουν σε ένα ρελέ ισχύος ή χρονικό ή βοηθητικό ρελέ τις χαρακτηρίζω όπως ακριβώς έχω χαρακτηρίσει και τα ίδια τα ρελέ ισχύος, χρονικά, βοηθητικά ρελέ.
Δηλαδή επειδή το ρελέ ισχύος Κ1Μ το έχω χαρακτηρίσει σαν Q1, τότε και τη βοηθητική του επαφή θα τη χαρακτηρίσω σαν Q1.
Μετά από αυτά ας προχωρήσουμε στο παρακάτω ολοκληρωμένο κύκλωμα ενός απλού αυτόματου κινητήρα μεstart-stop. Δεν έχουμε βάλει το θερμικό και θα δούμε μετά και αυτή την περίπτωση. Το κύκλωμα αποτελείται από ένα κλάδο (σχήμα 5)
Έχω δύο εισόδους, τα μπουτόν stop S1 και start S2 και τις οποίες χαρακτηρίζω σαν Ι1 και Ι2 αντίστοιχα και επίσης μια έξοδο, το πηνίο του ρελέ ισχύος Κ1Μ που την χαρακτηρίζω σαν Q1.
Εκτός από αυτά βλέπω ότι έχω και μια βοηθητική επαφή (13-14) του ρελέ ισχύος την οποία θα πρέπει να χαρακτηρίσω και αυτή.
Όλες τις βοηθητικές επαφές που ανήκουν σε ένα ρελέ ισχύος ή χρονικό ή βοηθητικό ρελέ τις χαρακτηρίζω όπως ακριβώς έχω χαρακτηρίσει και τα ίδια τα ρελέ ισχύος, χρονικά, βοηθητικά ρελέ.
Δηλαδή επειδή το ρελέ ισχύος Κ1Μ το έχω χαρακτηρίσει σαν Q1, τότε και τη βοηθητική του επαφή θα τη χαρακτηρίσω σαν Q1.
Οπότε ας προχωρήσουμε στη μετατροπή του κυκλώματος σε γλώσσα FBD.
Θυμίζω τον κανόνα που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR.
Δηλαδή στο κύκλωμά μας ξεκινάμε από τα δύο παράλληλα στοιχεία τα οποία είναι το μπουτόν start και η βοηθητική επαφή 13-14 του ρελέ ισχύος Κ1Μ.
Παίρνω λοιπόν μια πύλη OR με εισόδους Ι2 (start) και Q1 (βοηθητική επαφή 13-14).
Στη συνέχεια παίρνω μια πύλη AND με εισόδους το Ι1 (stop) και την έξοδο της πύλης OR. H έξοδος της AND θα δώσει στο Q1 (πηνίο ρελέ ισχύος Κ1Μ).
Θυμίζω τον κανόνα που θα πρέπει να έχουμε υπόψη μας είναι ότι σε κάθε κλάδο του κυκλώματος αρχίζουμε (ΑΝ ΜΠΟΡΟΥΜΕ) από τα στοιχεία που είναι συνδεδεμένα παράλληλα βάζοντάς τα σε μια πύλη OR.
Δηλαδή στο κύκλωμά μας ξεκινάμε από τα δύο παράλληλα στοιχεία τα οποία είναι το μπουτόν start και η βοηθητική επαφή 13-14 του ρελέ ισχύος Κ1Μ.
Παίρνω λοιπόν μια πύλη OR με εισόδους Ι2 (start) και Q1 (βοηθητική επαφή 13-14).
Στη συνέχεια παίρνω μια πύλη AND με εισόδους το Ι1 (stop) και την έξοδο της πύλης OR. H έξοδος της AND θα δώσει στο Q1 (πηνίο ρελέ ισχύος Κ1Μ).

H μετατροπή σε γλώσσα FBD με τη βοήθεια ενός προγράμματος φαίνεται στο παρακάτω σχήμα.


ΠΑΡΑΔΕΙΓΜΑ 6
Στο προηγούμενο κύκλωμα του σχήματος 5 ας προσθέσουμε και μια ενδεικτική λυχνία Λ1 που θα ανάβει όταν δουλεύει ο κινητήρας, δηλαδή όταν οπλίζει το ρελέ ισχύος Κ1Μ, την οποία θα χαρακτηρίσω σαν έξοδο Q2 (σχήμα 6).
Σε αυτή την περίπτωση αφού κάνω ακριβώς ότι έκανα στο προηγούμενο κύκλωμα, η έξοδος της τελικής πύλης AND θα δώσει εκτός από το Q1 (πηνίο ρελέ ισχύος Κ1Μ) KAI στο Q2 (ενδεικτική λυχνία Λ1). Δηλαδή το πηνίο Q1 και η ενδεικτική λυχνία Q2 ενεργοποιούνται ταυτόχρονα.
Στο προηγούμενο κύκλωμα του σχήματος 5 ας προσθέσουμε και μια ενδεικτική λυχνία Λ1 που θα ανάβει όταν δουλεύει ο κινητήρας, δηλαδή όταν οπλίζει το ρελέ ισχύος Κ1Μ, την οποία θα χαρακτηρίσω σαν έξοδο Q2 (σχήμα 6).
Σε αυτή την περίπτωση αφού κάνω ακριβώς ότι έκανα στο προηγούμενο κύκλωμα, η έξοδος της τελικής πύλης AND θα δώσει εκτός από το Q1 (πηνίο ρελέ ισχύος Κ1Μ) KAI στο Q2 (ενδεικτική λυχνία Λ1). Δηλαδή το πηνίο Q1 και η ενδεικτική λυχνία Q2 ενεργοποιούνται ταυτόχρονα.

ΠΑΡΑΔΕΙΓΜΑ 7
Στο προηγούμενο κύκλωμα του σχήματος 6 ας προσθέσουμε ακόμα μια ενδεικτική λυχνία Λ2 (την οποία θα χαρακτηρίσω σαν Q3) που θα ανάβει όταν δεν δουλεύει ο κινητήρας και θα σβήνει όταν δουλεύει, μέσω μιας κλειστής βοηθητικής επαφής (21-22) του ρελέ ισχύος Κ1Μ την οποία χαρακτηρίζω και αυτή σαν Q1 μιας και ανήκει στο ρελέ Κ1Μ (σχήμα 7).
Στο προηγούμενο κύκλωμα του σχήματος 6 ας προσθέσουμε ακόμα μια ενδεικτική λυχνία Λ2 (την οποία θα χαρακτηρίσω σαν Q3) που θα ανάβει όταν δεν δουλεύει ο κινητήρας και θα σβήνει όταν δουλεύει, μέσω μιας κλειστής βοηθητικής επαφής (21-22) του ρελέ ισχύος Κ1Μ την οποία χαρακτηρίζω και αυτή σαν Q1 μιας και ανήκει στο ρελέ Κ1Μ (σχήμα 7).
Σε αυτή την περίπτωση το κύκλωμά μου αποτελείται από δύο κλάδους (σχήμα 7).
Ο πρώτος κλάδος περιέχει το προηγούμενο κύκλωμα που περιλαμβάνει το μπουτόν stop, το μπουτόν start, την ανοικτή βοηθητική επαφή 13-14, το πηνίο του ρελέ ισχύος Κ1Μ και την ενδεικτική λυχνία Λ1.
Ο δεύτερος κλάδος περιλαμβάνει την κλειστή βοηθητική επαφή 21-22 και την ενδεικτική λυχνία Λ2.
Ο πρώτος κλάδος περιέχει το προηγούμενο κύκλωμα που περιλαμβάνει το μπουτόν stop, το μπουτόν start, την ανοικτή βοηθητική επαφή 13-14, το πηνίο του ρελέ ισχύος Κ1Μ και την ενδεικτική λυχνία Λ1.
Ο δεύτερος κλάδος περιλαμβάνει την κλειστή βοηθητική επαφή 21-22 και την ενδεικτική λυχνία Λ2.
Για τον πρώτο κλάδο κάνω ακριβώς τα ίδια με το προηγούμενο παράδειγμα.
Για τον δεύτερο κλάδο δεν χρειάζομαι καμιά πύλη γιατί δεν έχω στοιχεία συνδεδεμένα σε σειρά ή παράλληλα. Έχω μόνο το Q1 (κλειστή βοηθητική επαφή 21-22) που δίνει απευθείας στο Q3 (ενδεικτική λυχνία Λ2)
ΠΡΟΣΟΧΗ: Σε αυτή την περίπτωση έχω δύο βοηθητικές επαφές, μια ανοικτή (13-14) και μια κλειστή (21-22) που ανήκουν στο ίδιο ρελέ ισχύος Κ1Μ και τις οποίες και τις δύο τις έχω χαρακτηρίσει σαν Q1.
Επειδή όμως το πρόγραμμα σε αυτή την περίπτωση θα πρέπει να ξεχωρίζει ποια βοηθητική επαφή είναι ανοικτή και ποια κλειστή υπάρχει ο παρακάτω κανόνας:
Σε ένα ρελέ που έχει ανοικτές και κλειστές επαφές και το οποίο έχω χαρακτηρίσει σαν Q1, τις ανοικτές επαφές τις χαρακτηρίζω σαν Q1 και τις κλειστές σαν Q1(NOT).
Στο παράδειγμά μας δηλαδή, στο δεύτερο κλάδο η Q1 (κλειστή βοηθητική επαφή 21-22) θα δώσει στο Q3 (ενδεικτική λυχνία Λ2) αφού προηγουμένως περάσει από μια πύλη NOT όπως φαίνεται στο παρακάτω σχήμα 7.
Για τον δεύτερο κλάδο δεν χρειάζομαι καμιά πύλη γιατί δεν έχω στοιχεία συνδεδεμένα σε σειρά ή παράλληλα. Έχω μόνο το Q1 (κλειστή βοηθητική επαφή 21-22) που δίνει απευθείας στο Q3 (ενδεικτική λυχνία Λ2)
ΠΡΟΣΟΧΗ: Σε αυτή την περίπτωση έχω δύο βοηθητικές επαφές, μια ανοικτή (13-14) και μια κλειστή (21-22) που ανήκουν στο ίδιο ρελέ ισχύος Κ1Μ και τις οποίες και τις δύο τις έχω χαρακτηρίσει σαν Q1.
Επειδή όμως το πρόγραμμα σε αυτή την περίπτωση θα πρέπει να ξεχωρίζει ποια βοηθητική επαφή είναι ανοικτή και ποια κλειστή υπάρχει ο παρακάτω κανόνας:
Σε ένα ρελέ που έχει ανοικτές και κλειστές επαφές και το οποίο έχω χαρακτηρίσει σαν Q1, τις ανοικτές επαφές τις χαρακτηρίζω σαν Q1 και τις κλειστές σαν Q1(NOT).
Στο παράδειγμά μας δηλαδή, στο δεύτερο κλάδο η Q1 (κλειστή βοηθητική επαφή 21-22) θα δώσει στο Q3 (ενδεικτική λυχνία Λ2) αφού προηγουμένως περάσει από μια πύλη NOT όπως φαίνεται στο παρακάτω σχήμα 7.

ΠΑΡΑΔΕΙΓΜΑ 8
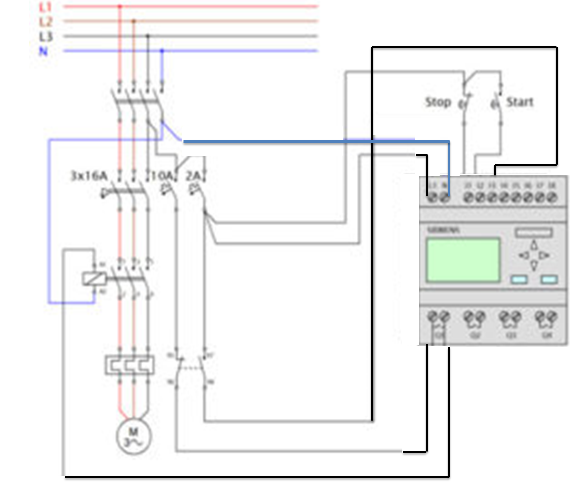
Στο κύκλωμα του σχήματος 5 (παράδειγμα 5) του απλού αυτόματου διακόπτη ενός κινητήρα ας προσθέσουμε και το θερμικό που λέγαμε το οποίο έχει δύο βοηθητικές επαφές. Μια κλειστή (95-96) που είναι πριν το μπουτόνstop και μια ανοικτή (97-98) που δίνει σε μια ενδεικτική λυχνία Λ1 που ανάβει όταν πέσει το θερμικό (σχήμα 8).
Σε αυτή την περίπτωση θα συνδέσω σαν είσοδο στο PLC την ανοικτή επαφή (97-98), ενώ την κλειστή (95-96) θα τη συνδέσω στη φάση που τροφοδοτεί τις εξόδους του PLC. ‘Ετσι εξασφαλίζουμε και μηχανική διακοπή των εξόδων σε περίπτωση που π.χ κολλήσει το ρελέ εξόδου Q1 του PLC.

Σε αυτή την περίπτωση όπως και στην προηγούμενη παρόλο που πρόκειται για είσοδο (επαφές θερμικού ) και όχι για έξοδο (βοηθητικές επαφές ρελέ), επειδή το πρόγραμμα θα πρέπει να καταλάβει τη διαφορά των δύο επαφών του θερμικού, θα πρέπει τη μια να τη θεωρήσω σαν Ι3 και την άλλη σαν Ι3(ΝΟΤ). Συνήθως (όχι αναγκαία) παίρνω σαν Ι3 την κλειστή και σαν Ι3(ΝΟΤ) την ανοικτή. ΠΡΟΣΟΧΗ: Τα μπουτόν start και stop παρόλο που είναι το ένα ανοικτής και το άλλο κλειστής επαφής, επειδή είναι διαφορετικά εξαρτήματα δεν ακολουθούν τον παραπάνω κανόνα.
Στο κύκλωμα του σχήματος 5 (παράδειγμα 5) του απλού αυτόματου διακόπτη ενός κινητήρα ας προσθέσουμε και το θερμικό που λέγαμε το οποίο έχει δύο βοηθητικές επαφές. Μια κλειστή (95-96) που είναι πριν το μπουτόνstop και μια ανοικτή (97-98) που δίνει σε μια ενδεικτική λυχνία Λ1 που ανάβει όταν πέσει το θερμικό (σχήμα 8).
Σε αυτή την περίπτωση θα συνδέσω σαν είσοδο στο PLC την ανοικτή επαφή (97-98), ενώ την κλειστή (95-96) θα τη συνδέσω στη φάση που τροφοδοτεί τις εξόδους του PLC. ‘Ετσι εξασφαλίζουμε και μηχανική διακοπή των εξόδων σε περίπτωση που π.χ κολλήσει το ρελέ εξόδου Q1 του PLC.
Σε αυτή την περίπτωση όπως και στην προηγούμενη παρόλο που πρόκειται για είσοδο (επαφές θερμικού ) και όχι για έξοδο (βοηθητικές επαφές ρελέ), επειδή το πρόγραμμα θα πρέπει να καταλάβει τη διαφορά των δύο επαφών του θερμικού, θα πρέπει τη μια να τη θεωρήσω σαν Ι3 και την άλλη σαν Ι3(ΝΟΤ). Συνήθως (όχι αναγκαία) παίρνω σαν Ι3 την κλειστή και σαν Ι3(ΝΟΤ) την ανοικτή. ΠΡΟΣΟΧΗ: Τα μπουτόν start και stop παρόλο που είναι το ένα ανοικτής και το άλλο κλειστής επαφής, επειδή είναι διαφορετικά εξαρτήματα δεν ακολουθούν τον παραπάνω κανόνα.

Τα προηγούμενα ισχύουν και για οποιοδήποτε διακόπτη διπλής επαφής (σχήμα 9).


ΠΑΡΑΔΕΙΓΜΑ 9
Ας δούμε και τα σύμβολα που χρησιμοποιούμε για τα χρονικά στη γλώσσα FBD (σχήμα 10).
Ας δούμε και τα σύμβολα που χρησιμοποιούμε για τα χρονικά στη γλώσσα FBD (σχήμα 10).

Τα παραπάνω ισχύουν για όλα τα είδη των χρονικών.
ΠΑΡΑΔΕΙΓΜΑ 10
Αν καταλάβατε τα παραπάνω μπορείτε να μετατρέψετε σε γλώσσα FBD το 90% των κλασσικών κυκλωμάτων αυτοματισμού. Ας δούμε ένα παράδειγμα που περιέχει αρκετούς από τους παραπάνω κανόνες (σχήμα 11).
Στην συγκεκριμένη εφαρμογή ζητείται να σχεδιαστεί να μετατραπεί σε γλώσσα FBD το βοηθητικό κύκλωμα τεσσάρων κινητήρων που ελέγχονται από τους ηλεκτρονόμους Κ1Μ, Κ2Μ, Κ3Μ και Κ4Μ οι οποίοι θα πρέπει να λειτουργούν κάτω από τις εξής συνθήκες :
Αν καταλάβατε τα παραπάνω μπορείτε να μετατρέψετε σε γλώσσα FBD το 90% των κλασσικών κυκλωμάτων αυτοματισμού. Ας δούμε ένα παράδειγμα που περιέχει αρκετούς από τους παραπάνω κανόνες (σχήμα 11).
Στην συγκεκριμένη εφαρμογή ζητείται να σχεδιαστεί να μετατραπεί σε γλώσσα FBD το βοηθητικό κύκλωμα τεσσάρων κινητήρων που ελέγχονται από τους ηλεκτρονόμους Κ1Μ, Κ2Μ, Κ3Μ και Κ4Μ οι οποίοι θα πρέπει να λειτουργούν κάτω από τις εξής συνθήκες :
Ο καθένας θα έχει δικό του START, STOP, θερμικό.Σε περίπτωση που ενεργοποιηθεί ένα θερμικό να σταματούν και οι τέσσερις κινητήρες..Ο Κ2Μ ξεκινά και αυτόματα 30 sec μετά την ενεργοποίηση του Κ1Μ.Για να ξεκινήσει Κ3Μ θα πρέπει να λειτουργεί και ο Κ1Μ και ο Κ2Μ. Στην περίπτωση που δουλεύουν οι Κ1Μ,Κ2Μ και Κ4Μ και πατήσω να ξεκινήσει ο Κ3Μ τότε ο Κ4Μ θα σταματήσει.Για να ξεκινήσει ο Κ4Μ θα πρέπει να λειτουργεί είτε ο Κ1Μ είτε ο Κ2Μ, και ο Κ3Μ να μην δουλεύειΣτη μετατροπή βέβαια, η παραπάνω εξήγηση της λειτουργίας του κυκλώματος δεν έχει καμία σημασία.

Αυτό που μας ενδιαφέρει είναι να χαρακτηρίσουμε τις εισόδους και τις εξόδους του κυκλώματος. Έχουμε λοιπόν:
ΕΙΣΟΔΟΙ
Ι1: θερμικό F1 Ι2: θερμικό F2
Ι3: θερμικό F3
Ι4: θερμικό F4
Ι5: stop S1 Ι6: stop S2 Ι7: stop S3 Ι8: stop S4
I9: start S5
I10: start S6
I11: start S7
I12: start S8
ΕΞΟΔΟΙQ1: ρελέ ισχύος Κ1Μ Q2: ρελέ ισχύος Κ2Μ Q3: ρελέ ισχύος Κ3Μ Q4: ρελέ ισχύος Κ4Μ
Επίσης έχουμεΜ1: βοηθητικό ρελέ Κ1Α
Μ2: βοηθητικό ρελέ Κ2Α
Τ1: χρονικό ρελέ Κ1Τ Τις βοηθητικές επαφές των ρελέ ισχύος, βοηθητικών ρελέ και χρονικού τις χαρακτηρίζω όπως έχω χαρακτηρίσει τα πηνία τους. Όλα αυτά φαίνονται στο σχήμα 12.

Ξεκινάω λοιπόν να μετατρέπω κάθε κλάδο του κυκλώματος σε γλώσσα FBD. Θα παρατηρήσω ότι υπάρχουν 6 κλάδοι και τα θερμικά F1, F2, F3, F4 είναι το κοινό σημείο για κάθε κλάδο. Για το λόγο αυτό θα πρέπει να τα υπολογίζω το ίδιο σε κάθε κλάδο ξεχωριστά. Ένα καλό tip σε αυτές τις περιπτώσεις στις οποίες ένα κομμάτι του κυκλώματος είναι κοινό σε αρκετούς κλάδους είναι αυτό: Μπορούμε αφού αναλύσουμε με πύλες το συγκεκριμένο κομμάτι, το αποτέλεσμα να το οδηγήσουμε σε μια flag M (μια ενδιάμεση μνήμη). Αυτό μας βοηθάει σε μεγάλα προγράμματα να χρησιμοποιούμε το αποτέλεσμα του κοινού κομματιού του κυκλώματος εύκολα και γρήγορα. Aς δούμε στο παράδειγμά μας.
Τα θερμικά είναι σε σειρά οπότε θα πάρω μια πύλη AND και θα τα βάλω σαν εισόδους. Την έξοδο της AND θα την οδηγήσω λοιπόν σε μια flag M3 {Μ3 γιατί ήδη στο κύκλωμά μου έχω χαρακτηρίσει τα βοηθητικά ρελέ σαν Μ1 και Μ2 (σχήμα 13)}.
Τα θερμικά είναι σε σειρά οπότε θα πάρω μια πύλη AND και θα τα βάλω σαν εισόδους. Την έξοδο της AND θα την οδηγήσω λοιπόν σε μια flag M3 {Μ3 γιατί ήδη στο κύκλωμά μου έχω χαρακτηρίσει τα βοηθητικά ρελέ σαν Μ1 και Μ2 (σχήμα 13)}.


Συνεχίζουμε τώρα ξεχωριστά για κάθε κλάδο θυμίζοντας ότι ξεκινάμε (αν μπορούμε) από τα παράλληλα στοιχεία του κυκλώματος.
Στον 1o κλάδο (σχήμα 14) έχουμε παράλληλα τα Ι9 (μπουτόν start S5) και Q1 (ΝΟ βοηθητική επαφή του Κ1Μ). Άρα τα βάζουμε σαν εισόδους σε μια πύλη OR.Στη συνέχεια έχουμε σε σειρά την έξοδο της Μ3 ( όλα τα θερμικά), το Ι5 (μπουτόν stop S1) και την έξοδο της προηγούμενης OR. Αυτά λοιπόν τα οδηγούμε σαν εισόδους σε μια πύλη AND.
Η έξοδος της AND θα δώσει στο Q1 (πηνίο ρελέ ισχύος Κ1Μ) και στο Τ1 (χρονικό ρελέ Κ1Τ).
Στον 1o κλάδο (σχήμα 14) έχουμε παράλληλα τα Ι9 (μπουτόν start S5) και Q1 (ΝΟ βοηθητική επαφή του Κ1Μ). Άρα τα βάζουμε σαν εισόδους σε μια πύλη OR.Στη συνέχεια έχουμε σε σειρά την έξοδο της Μ3 ( όλα τα θερμικά), το Ι5 (μπουτόν stop S1) και την έξοδο της προηγούμενης OR. Αυτά λοιπόν τα οδηγούμε σαν εισόδους σε μια πύλη AND.
Η έξοδος της AND θα δώσει στο Q1 (πηνίο ρελέ ισχύος Κ1Μ) και στο Τ1 (χρονικό ρελέ Κ1Τ).


Με το ίδιο σκεπτικό μετατρέπουμε και το 2o κλάδο (σχήμα 15).


Στο 3o κλάδο (σχήμα 16) δεν έχουμε αυτούσια (μόνα τους) παράλληλα στοιχεία. Έχουμε τα Ι11, Q1, Q2 σε σειρά τα οποία θα τα οδηγήσουμε σαν εισόδους σε μια πύλη AND.Έχουμε τα Q3 και Μ1 σε σειρά τα οποία και αυτά θα τα οδηγήσουμε σαν εισόδους σε μια άλλη πύλη AND. Προσοχή όμως εδώ. Η Μ1 είναι NC επαφή και θα πρέπει πριν την οδηγήσω στη πύλη AND να την περάσω πρώτα από μια πύληNOT.
Τώρα πια έχω παράλληλα τα αποτελέσματα των δύο προηγούμενων πυλών AND. Έτσι λοιπόν τις εξόδους των δύο ANDθα τις οδηγήσω σαν εισόδους σε μια πύλη OR.Τέλος θα βάλω σε μια άλλη τρίτη AND εισόδους τα Μ3, Ι7 και την έξοδο της OR. Tην τελική έξοδο αυτής της AND θα τη στείλω στο Q3.
Τώρα πια έχω παράλληλα τα αποτελέσματα των δύο προηγούμενων πυλών AND. Έτσι λοιπόν τις εξόδους των δύο ANDθα τις οδηγήσω σαν εισόδους σε μια πύλη OR.Τέλος θα βάλω σε μια άλλη τρίτη AND εισόδους τα Μ3, Ι7 και την έξοδο της OR. Tην τελική έξοδο αυτής της AND θα τη στείλω στο Q3.

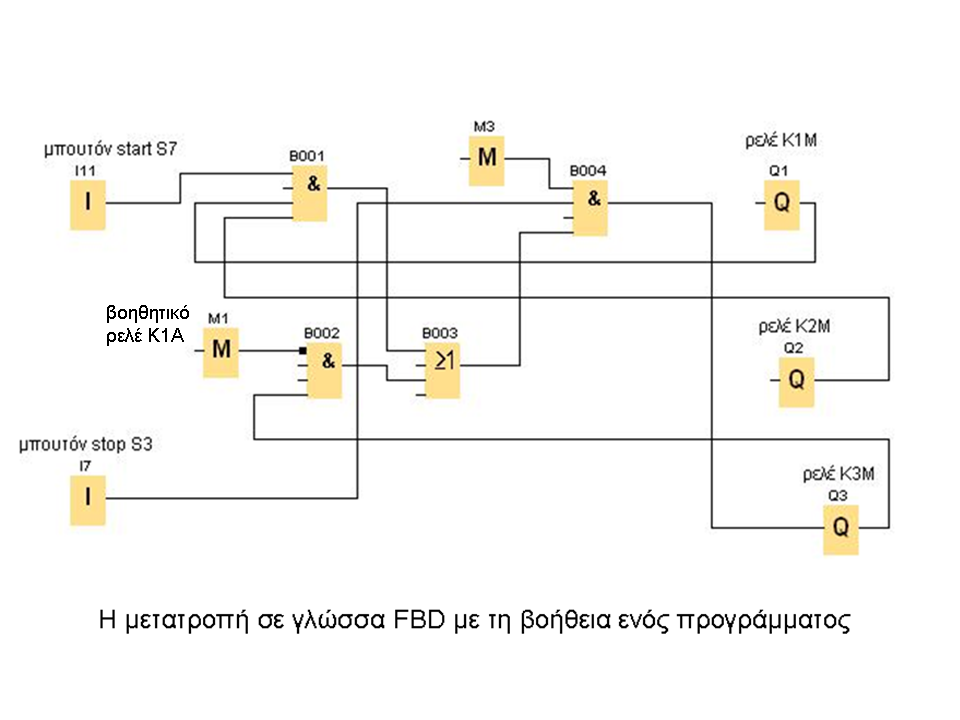
Στο 4o κλάδο (σχήμα 17) ξεκινάμε όπως έχουμε πει από τα παράλληλα στοιχεία Q1 και Q2 βάζοντάς τα σαν εισόδους σε μια πύλη OR.Στη συνέχεια σε μια πύλη AND βάζουμε εισόδους το Ι12 και την έξοδο της προηγούμενης OR.Σε μια AND βάζουμε εισόδους τα Q4 και M2 προσέχοντας το M2 να το περάσουμε πρώτα από μια πύλη NOT γιατί είναιNC επαφή.
ΣΕ μια OR βάζουμε εισόδους τις εξόδους των δύο προηγούμενων πυλών AND
Τέλος σε μια νέα AND βάζουμε εισόδους τα Μ3, Ι8 και την έξοδο της προηγούμενης OR. Την έξοδο της τελικής AND τη στέλνω στο Q4.
ΣΕ μια OR βάζουμε εισόδους τις εξόδους των δύο προηγούμενων πυλών AND
Τέλος σε μια νέα AND βάζουμε εισόδους τα Μ3, Ι8 και την έξοδο της προηγούμενης OR. Την έξοδο της τελικής AND τη στέλνω στο Q4.


Στο 5o κλάδο (σχήμα 18) τα πράγματα είναι απλά μιας και έχουμε στοιχεία μόνο σε σειρά οπότε σε μια πύλη ANDβάζουμε εισόδους τα Μ3, Q1, Q2, Q4 προσέχοντας τα Q1, Q2, Q4 να τα περάσουμε πρώτα από μια πύλη NOT γιατί είναιNC επαφές. Την έξοδο της AND την στέλνουμε στο Μ1.


Στο 6o κλάδο (σχήμα 19) τα πράγματα είναι εξίσου απλά μιας και έχουμε στοιχεία μόνο σε σειρά οπότε σε μια πύληAND βάζουμε εισόδους τα Μ3, Q1, Q3 προσέχοντας τα Q1, Q3 να τα περάσουμε πρώτα από μια πύλη NOT γιατί είναιNC επαφές. Την έξοδο της AND την στέλνουμε στο Μ2.




Η ολοκληρωμένη μετατροπή όλου του κυκλώματος με τη βοήθεια ενός προγράμματος φαίνεται στο επόμενο σχήμα:


Ας δούμε και δυο περιπτώσεις πολύπλοκων κυκλωμάτων
ΠΑΡΑΔΕΙΓΜΑ 11
Στο παράδειγμα του σχήματος 20 το κύκλωμα μπορεί να αναλυθεί σε δύο επιμέρους τμήματα .
ΠΑΡΑΔΕΙΓΜΑ 11
Στο παράδειγμα του σχήματος 20 το κύκλωμα μπορεί να αναλυθεί σε δύο επιμέρους τμήματα .



Η μετατροπή τώρα των δύο επιμέρους κυκλωμάτων είναι νομίζω εύκολη και μπορεί να την κάνει ο καθένας.ΠΑΡΑΔΕΙΓΜΑ 12
Μια τέτοια όπως του προηγούμενου παραδείγματος 11 κλασσική περίπτωση πολύπλοκου κυκλώματος είναι οδιακόπτης αστέρα-τριγώνου που βλέπετε στο σχήμα 21 και το οποίο αποτελείται από 6 κλάδους (1ος κλάδος καταλήγει στο ρελέ του αστέρα, 2ος κλάδος στο χρονικό, 3ος κλάδος στο γενικό ρελέ, 4ος κλάδος στο ρελέ του τριγώνου, 5ος κλάδος στο λαμπάκι λειτουργίας και 6ος κλάδος στο λαμπάκι πτώσης θερμικού).
Μια τέτοια όπως του προηγούμενου παραδείγματος 11 κλασσική περίπτωση πολύπλοκου κυκλώματος είναι οδιακόπτης αστέρα-τριγώνου που βλέπετε στο σχήμα 21 και το οποίο αποτελείται από 6 κλάδους (1ος κλάδος καταλήγει στο ρελέ του αστέρα, 2ος κλάδος στο χρονικό, 3ος κλάδος στο γενικό ρελέ, 4ος κλάδος στο ρελέ του τριγώνου, 5ος κλάδος στο λαμπάκι λειτουργίας και 6ος κλάδος στο λαμπάκι πτώσης θερμικού).

Χαρακτηρίζουμε τις εισόδους-εξόδους όπως ξέρουμε(σχήμα 22).

Στο σχήμα 23 το τμήμα 1 του κυκλώματος είναι κοινό για τα τμήματα 2 και 3 (δηλαδή το τμήμα 1 είναι κοινό για τους κλάδους 1 έως 5).

Αγνοούμε το τμήμα 3 και προχωράμε στη μετατροπή του κυκλώματος σε γλώσσα FBD.

Αγνοούμε τώρα το τμήμα 2 και συνεχίζουμε στη μετατροπή του κυκλώματος σε γλώσσα FBD.

ΠΑΡΑΔΕΙΓΜΑ 13
Μια άλλη πολύπλοκη συνδεσμολογία είναι αυτή του σχήματος 24 που λέγεται συνδεσμολογία γέφυρας και στην οποία κάνουμε απλοποίηση του κυκλώματος. Μετά την απλοποίηση είναι και σε αυτό εύκολη η μετατροπή σε γλώσσαFBD.
Μια άλλη πολύπλοκη συνδεσμολογία είναι αυτή του σχήματος 24 που λέγεται συνδεσμολογία γέφυρας και στην οποία κάνουμε απλοποίηση του κυκλώματος. Μετά την απλοποίηση είναι και σε αυτό εύκολη η μετατροπή σε γλώσσαFBD.


Στα προηγούμενα ασχοληθήκαμε με τη μετατροπή κυκλωμάτων που περιείχαν ψηφιακές εισόδους και εξόδους, δηλαδή εισόδους και εξόδους που παίρνουν τιμή ‘’0’’ ή ‘’1’’.Τα PlC όμως μπορούν να καλύψουν πλήρως και τα συστήματα αυτόματου ελέγχου, όπως είναι οι αναλογικοί έλεγχοι θερμοκρασίας, πίεσης, στροφών κινητήρων κ.λ.π. Αυτό γίνεται με τη δυνατότητα των PLC να δέχονται και ναεπεξεργάζονται αναλογικές εισόδους, όπως και να παρέχουν αναλογικές εξόδους. Το PLC μετατρέπει τις αναλογικές τιμές των εισόδων σε ψηφιακές τιμές και στη συνέχεια επεξεργάζεται τις τιμές αυτές αξιοποιώντας τις δυνατότητες για επεξεργασία ψηφιακών αριθμών όπως είδαμε.
Άρθρο του καθηγητή Τάσου Αντωνάκη-Ηλεκτρολόγου Μηχανικού ΤΕ-Εκπαιδευτικού 1ης ΕΠΑΣ ΟΑΕΔ ΘΕΣΣΑΛΟΝΙΚΗΣ...Δημοσιεύθηκε στην εφημερίδα Εγκαταστάτης
Reblog https://oaedhlectrologoi.blogspot.com/
Reblog https://oaedhlectrologoi.blogspot.com/
Να ευχαριστήσουμε τους ΗΛΕΚΤΡΟΛΟΓΟΥΣ της 1ης ΕΠΑΣ ΟΑΕΔ ΘΕΣΣΑΛΟΝΙΚΗΣ για το εκπληκτικό τεχνολογικό περιεχόμενο και τα υπέροχα άρθρα που δημοσιεύουν στο blog τους.